

 991
991Оторваться от земли. Большой апгрейд
16 марта 2016, 15:28 | Мы Автор: Night_Ghost
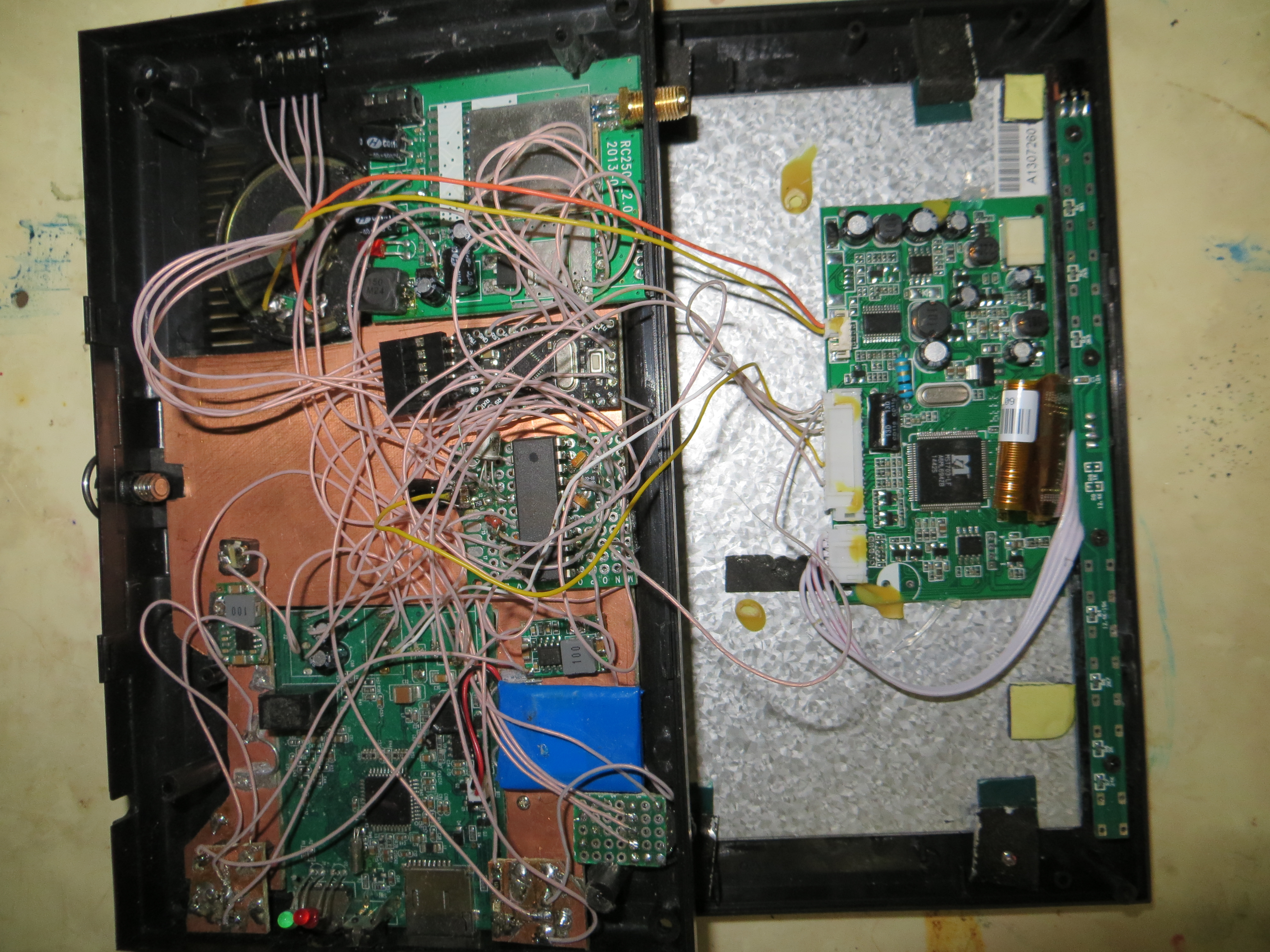
Осень, дожди - погода нелетная. К тому же накопилось критическое количество нового железа - а значит пришло время все это поставить, дабы улучшить и убольшить. И вот снова коптер кишками наружу.
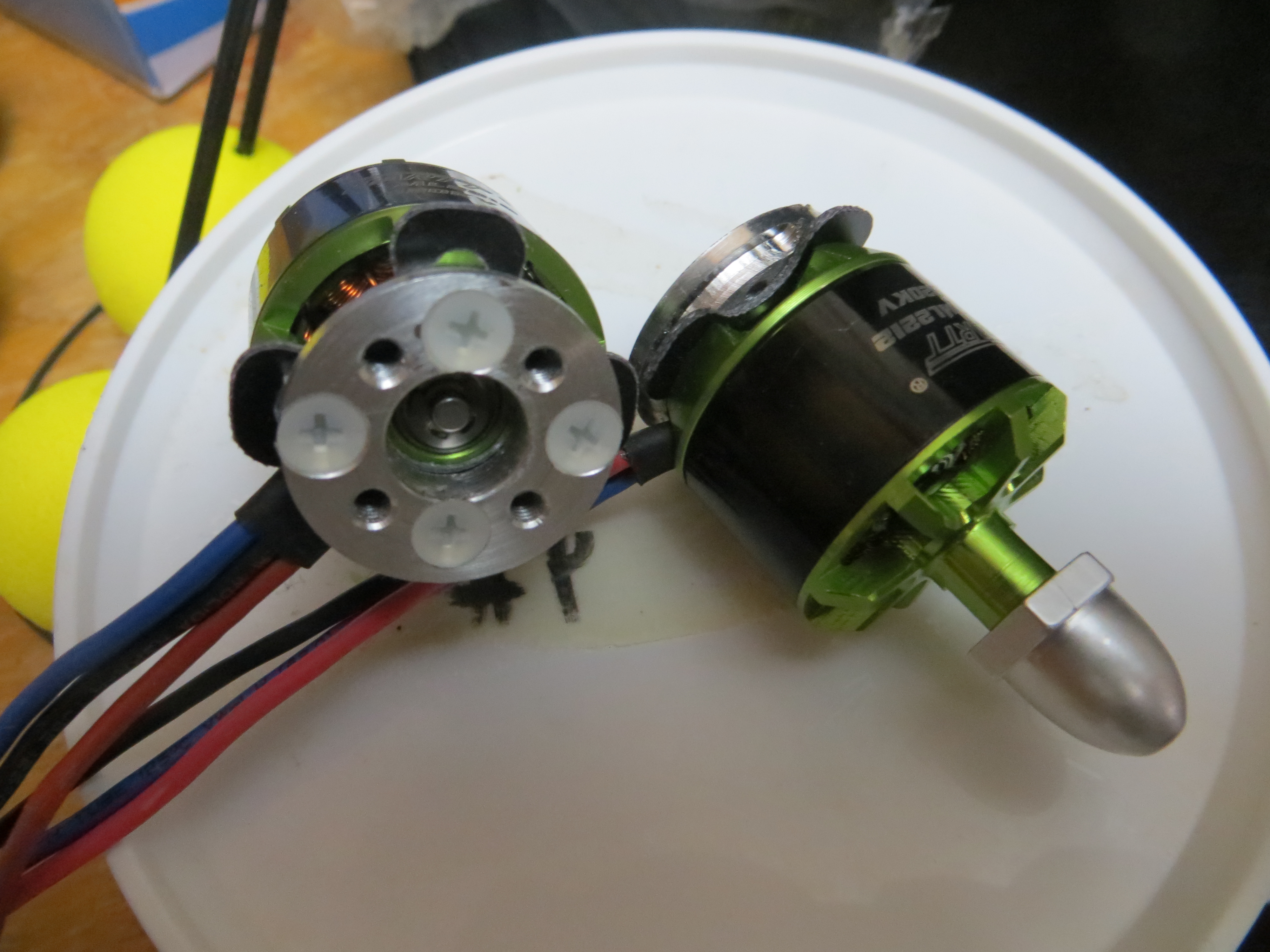
Пункт первый - моторы GARTT и регуляторы неизвестной породы. Которые хоть и нравятся мне "на глаз" меньше чем родные (линейный стабилизатор против импульсного, отсутствие драйверов MOSFET), но по тестам показывают некое увеличение эффективности и (самое главное!) имеют быструю прошивку SimonK, коя по отзывам убирает раскачку при снижении. Моторы же эти с хорошими винтами позволяют увеличить вес коптера до 1600 грамм (400 на мотор) без снижения эффективности.

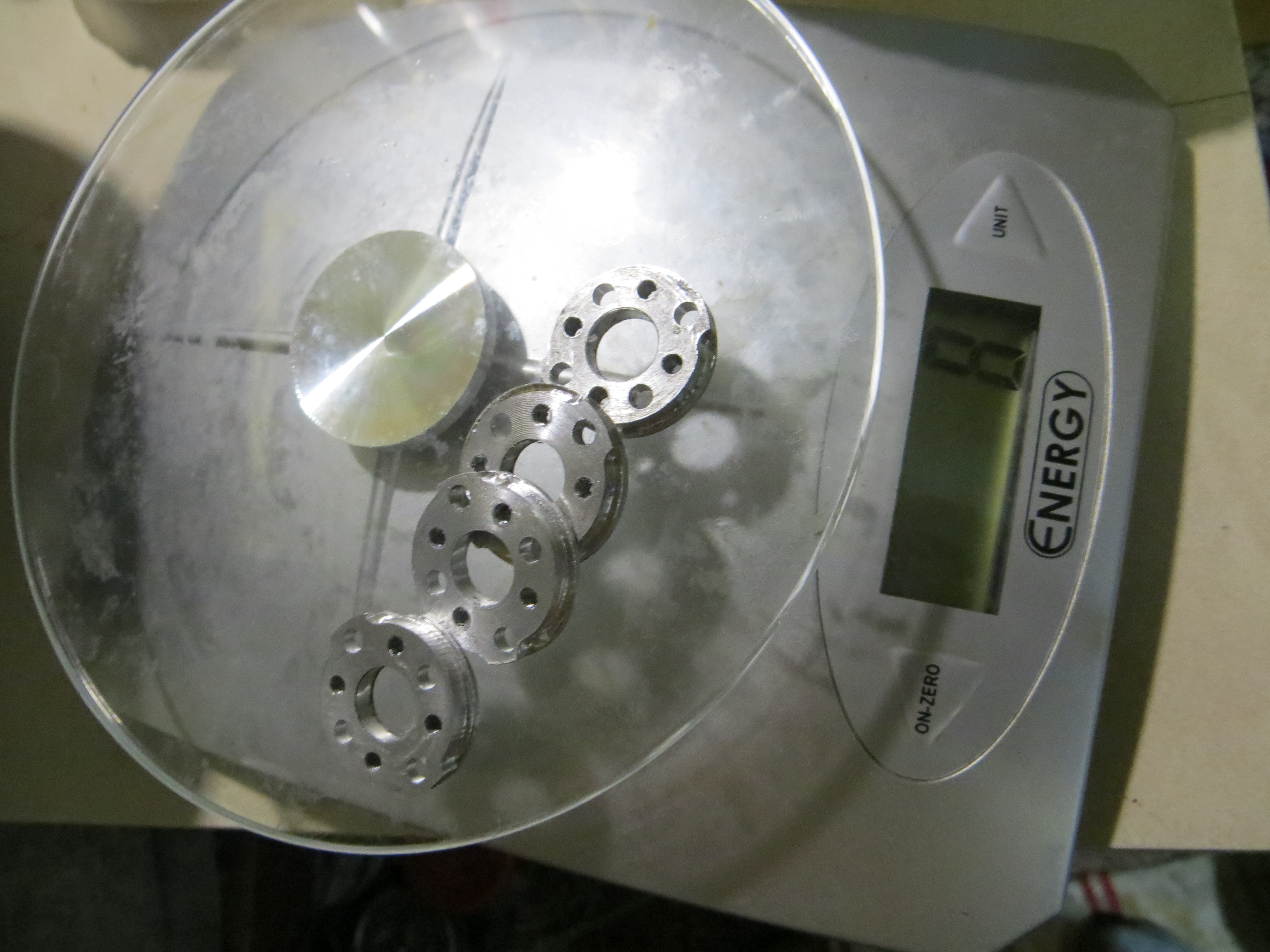
Для "бескровной" установки моторов с другой крепежной розеткой были изготовлены магниевые переходники, а в роли теплоизоляции использованы чуть доработанные фрезеровкой отверстий изоляционные пластины от Тали H500. Неожиданно обнаружилось что 16 винтиков весят аж 8 грамм, так что вместо железных винтиков поставлены пластиковые. Дюралевого крепежа найти не удалось ![]()
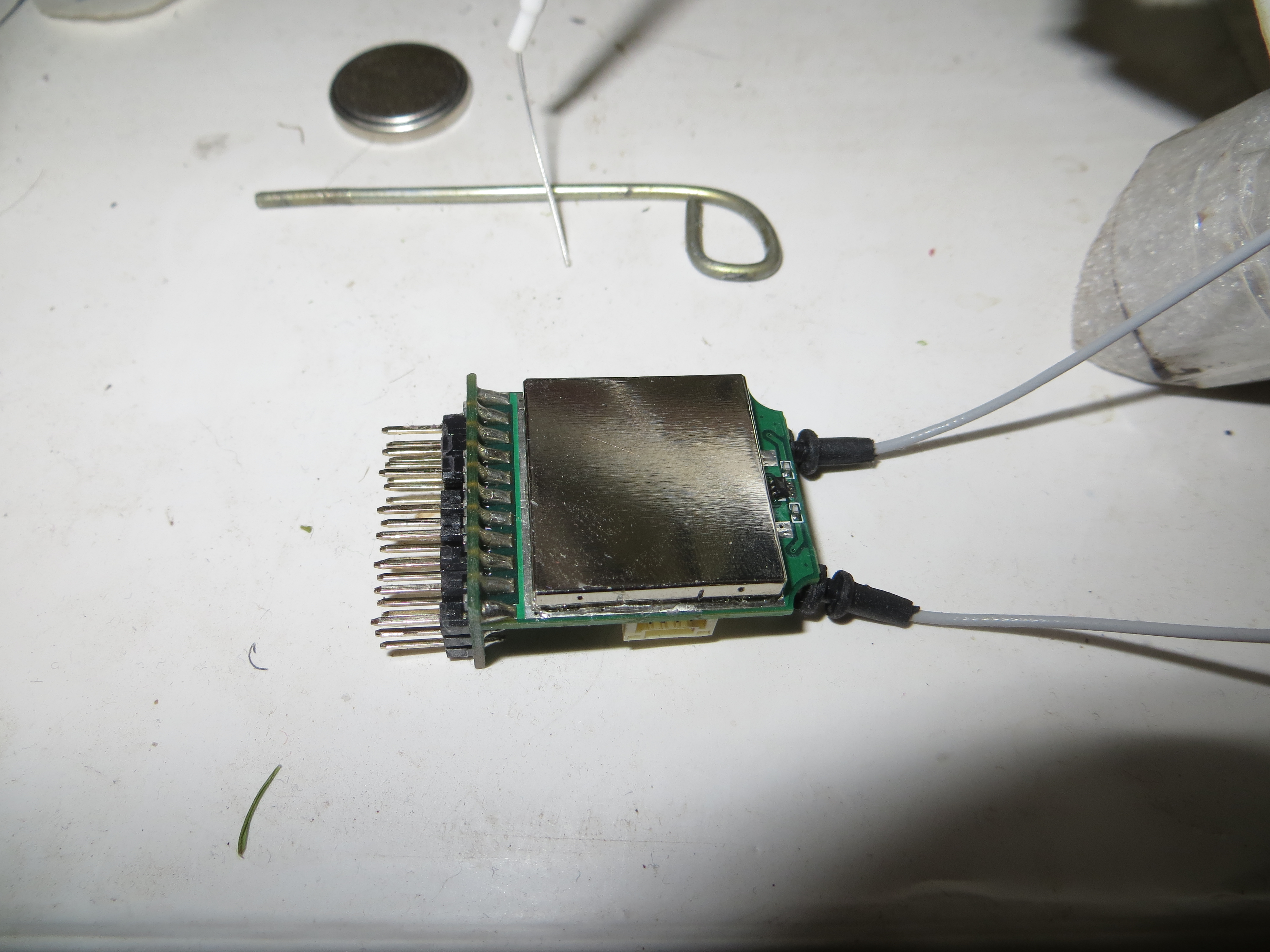
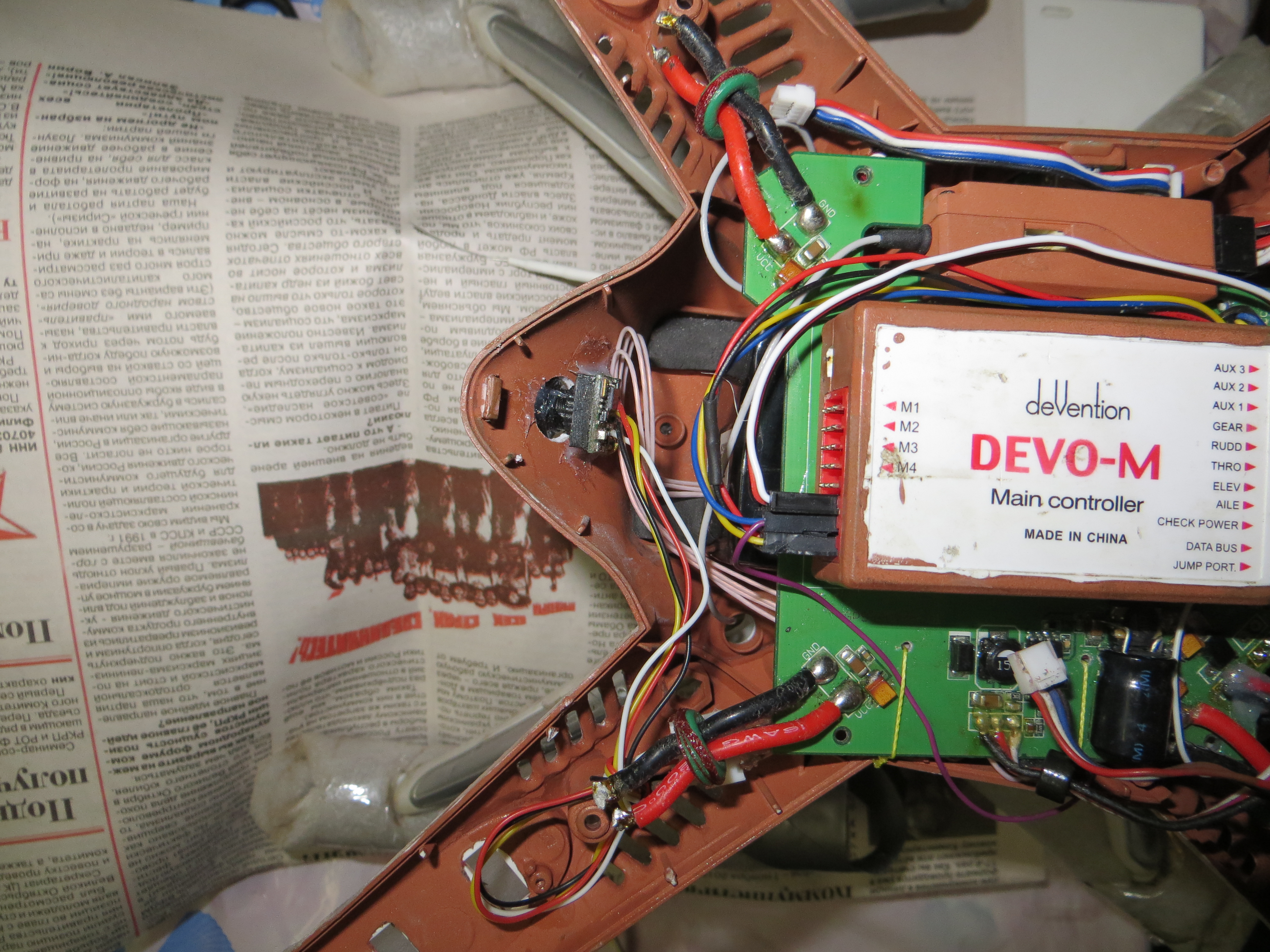
Пункт второй - новый приемник, RX705 опять же от Тали. Брался он ради телеметрии, ибо не дело иметь телеметрийный пульт (несмотря на отсутствие в наименовании буквы S все пульты Devo10 содержат модуль телеметрии!) - и не иметь возможности этим пользоваться. Однако по его приезду была обнаружена огромная разница между ним и штатным RX703a!
- антенны теперь это не просто зачищенный кусок кабеля, а настоящие диполи. Что обещает лучшую чувствительность и помехозащищенность.
- вся ВЧ часть накрыта экраном, опять же помехозащищенность.
- антенны на плате не просто спаяны вместе, а подключены ко входу через коммутатор, то есть работают как настоящее diversity.
- и что было самым приятным сюрпризом - он восстанавливает управление после потери связи!
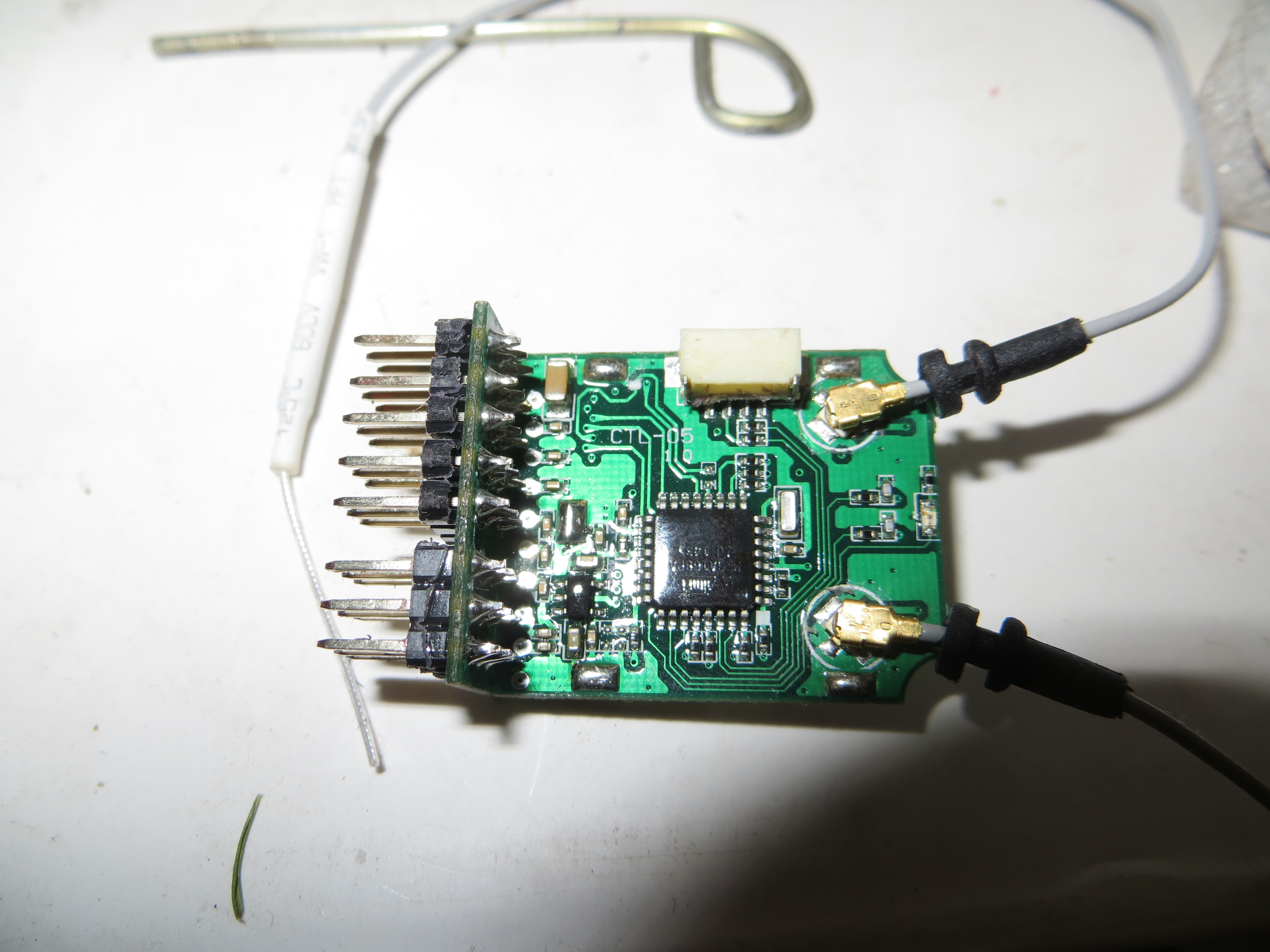
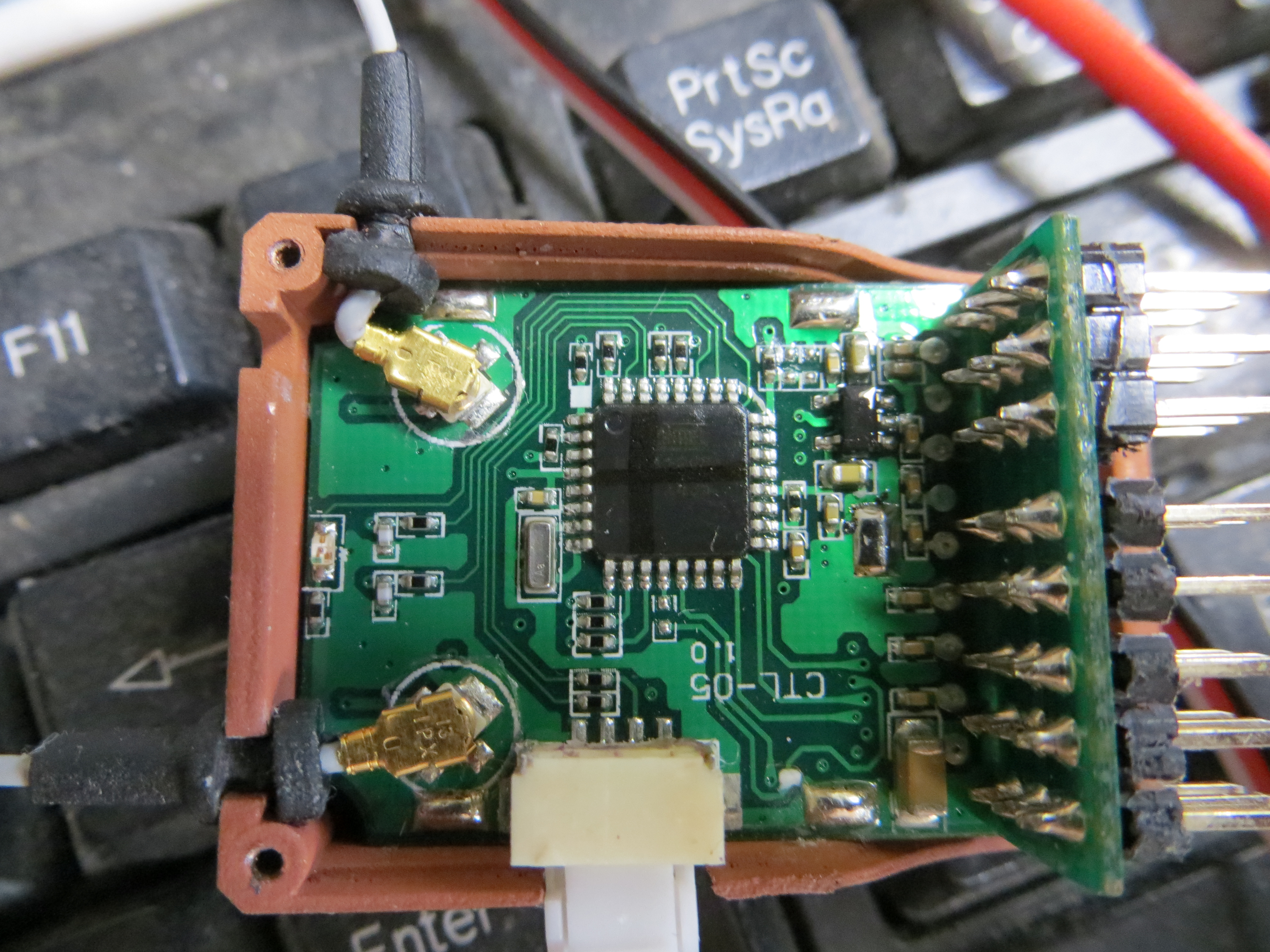
Пересадка приемника оказалась делом не самым элементарным - во-первых антенны отказались пролезать через отверстия в ногах, а во-вторых с новым приемником перестало работать управление подвесом. Причина оказалась в другом наборе каналов, выводимых в виде PWM на индивидуальные выводы, ведь на самом-то деле этот приемник аж 12-канальный! Так что пришлось взять серву и ей нащупывать нужные выходы.
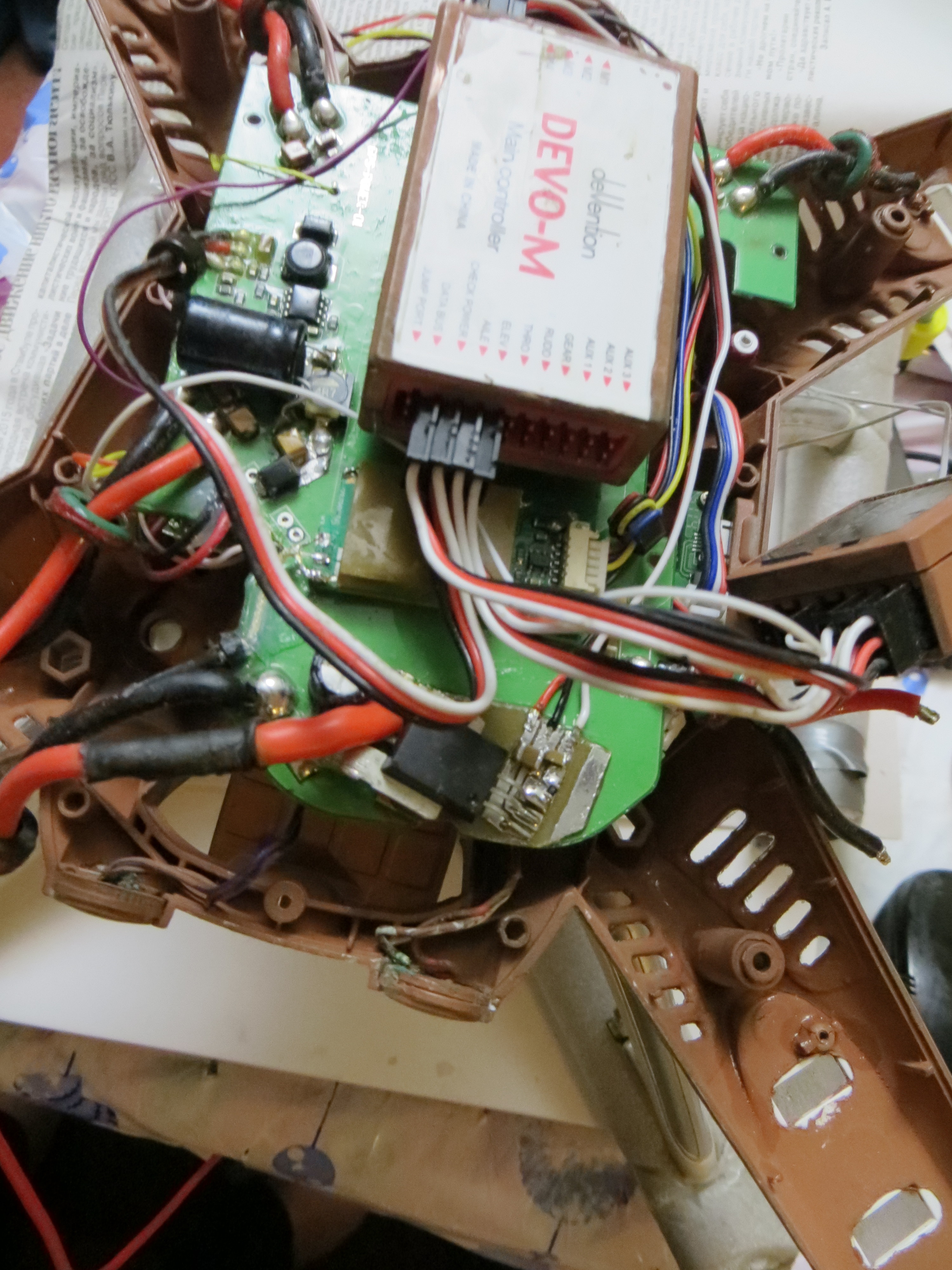
Датчик тока на правильном чипе Allegro в целях уменьшения веса был поставлен прямо на основную плату, что потребовало небольшой доработки датчика - подгибания силовых ног.
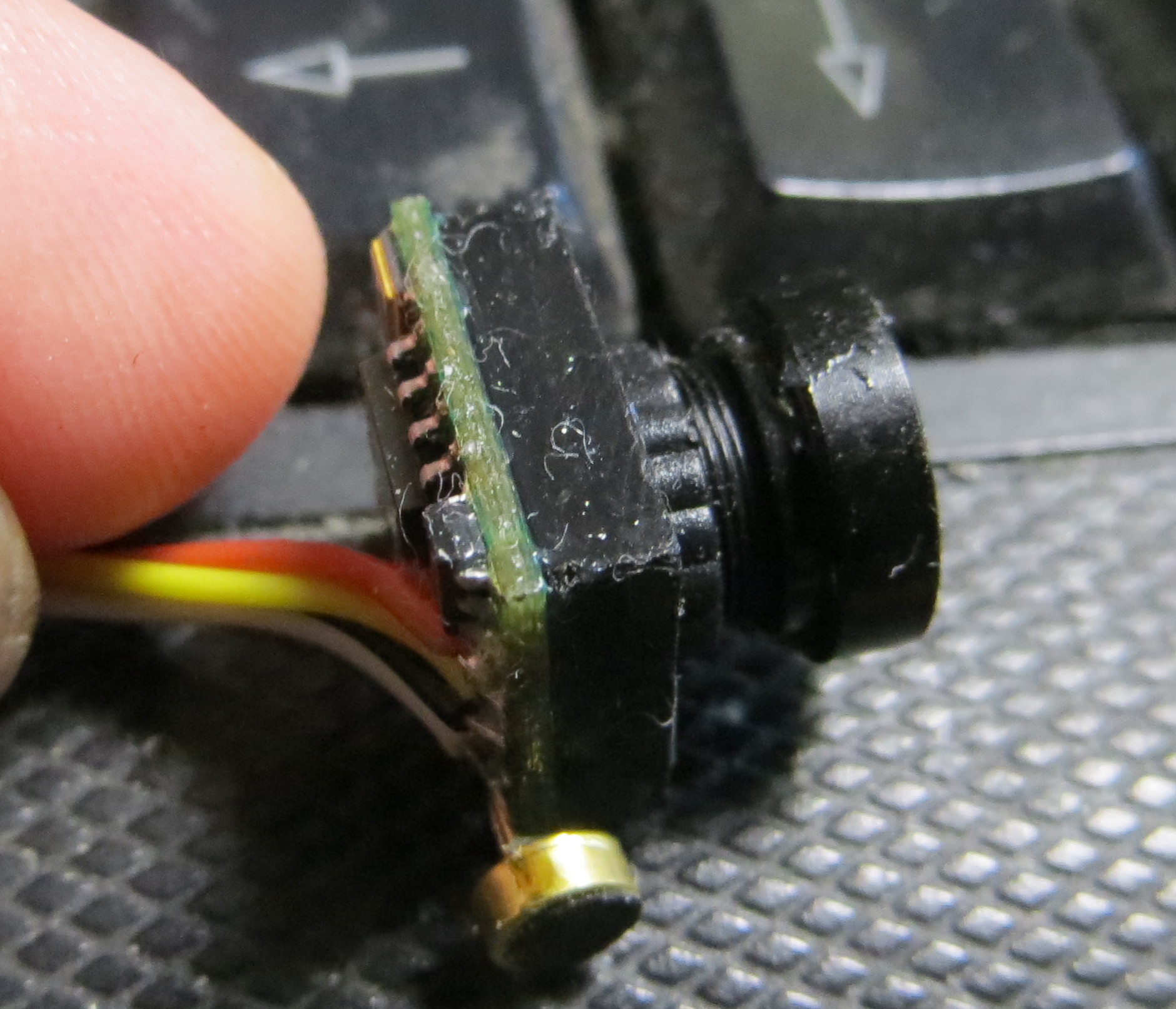
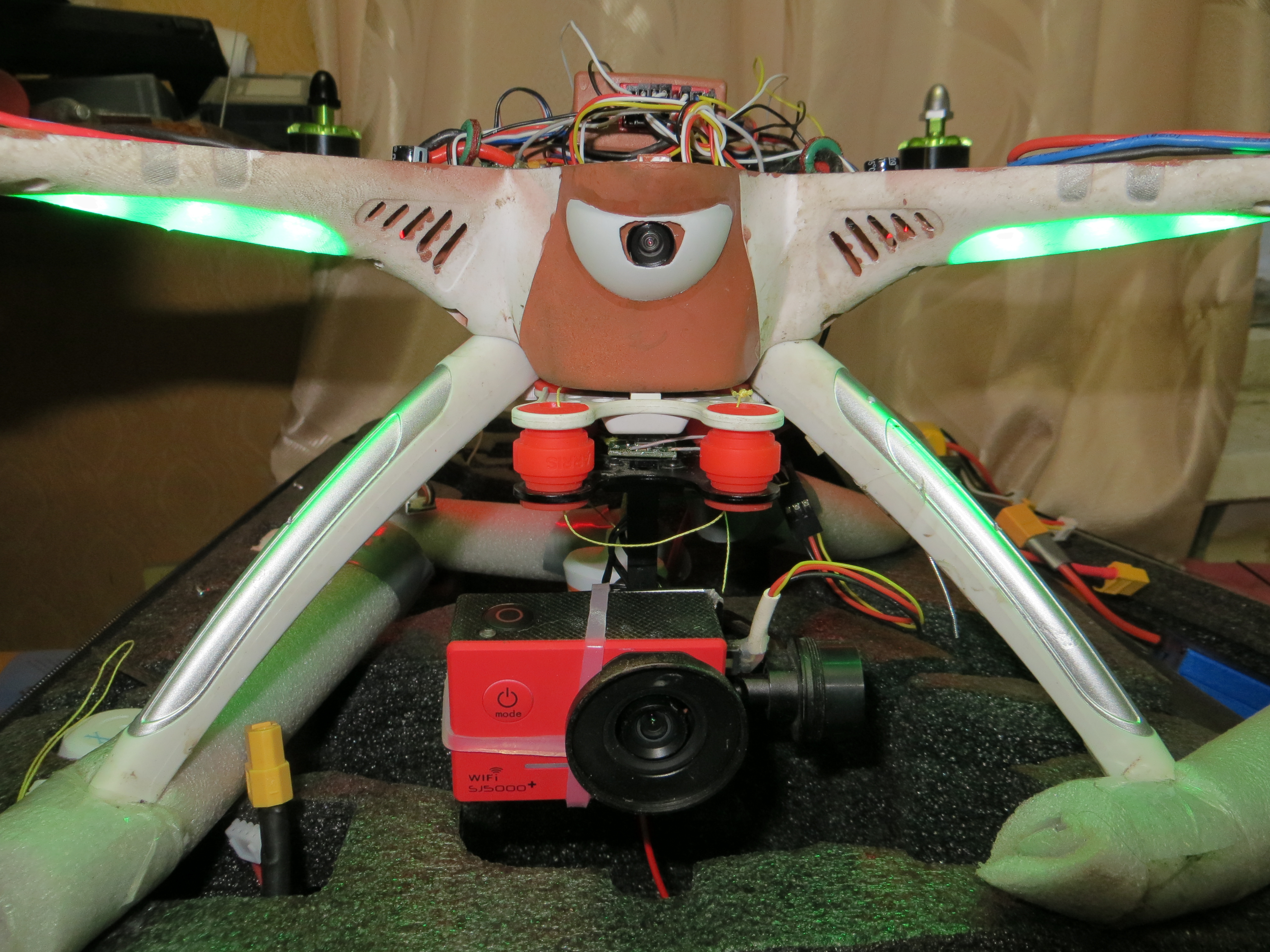
А раз все равно корпус уже разобран, то заодно установил и курсовую камеру, теперь можно таскать основную и в герметичном боксе. В ее роли использована мелкая камера с бангуда, совсем крошечная но дающая на удивление приличную картинку.
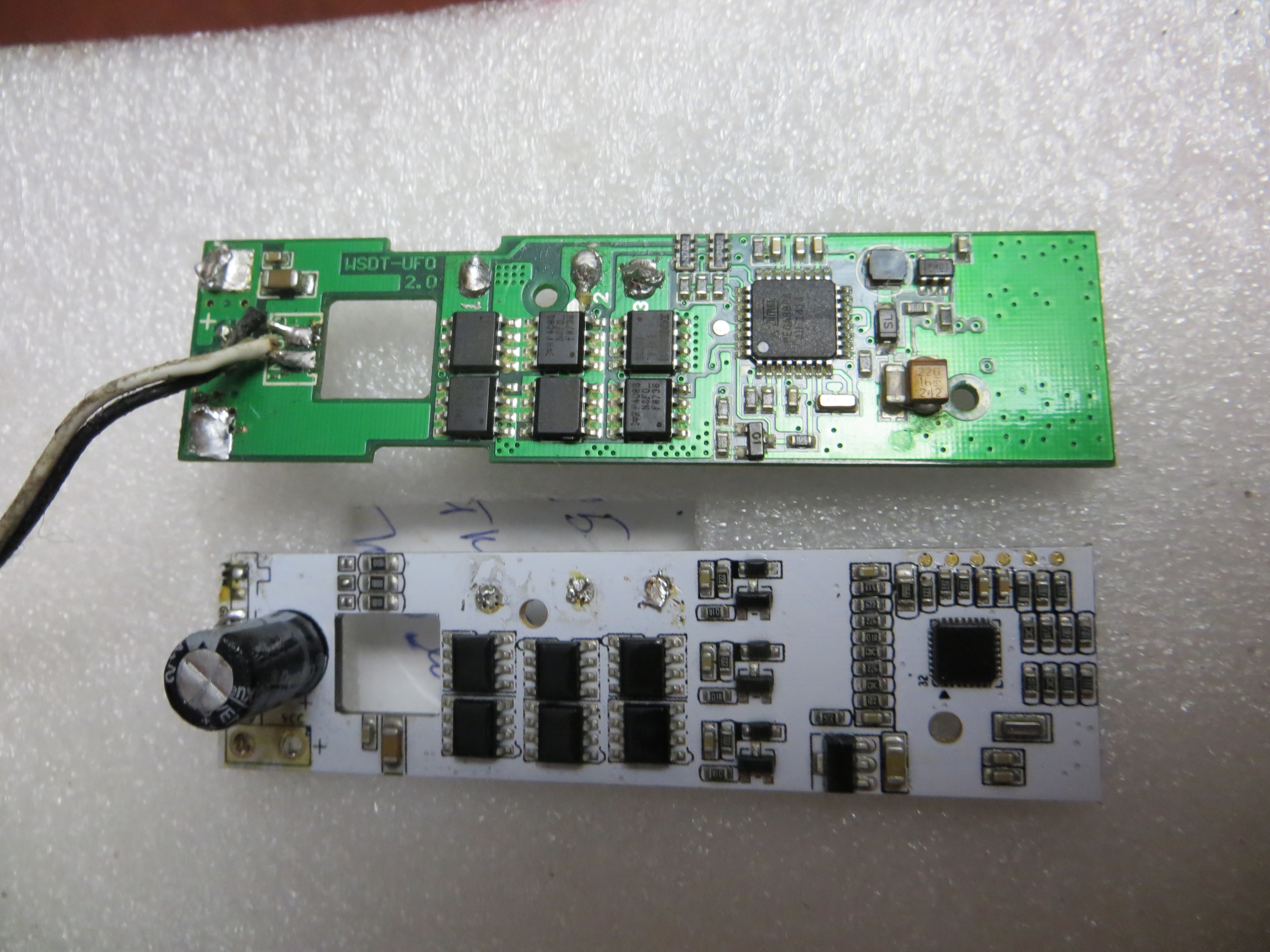
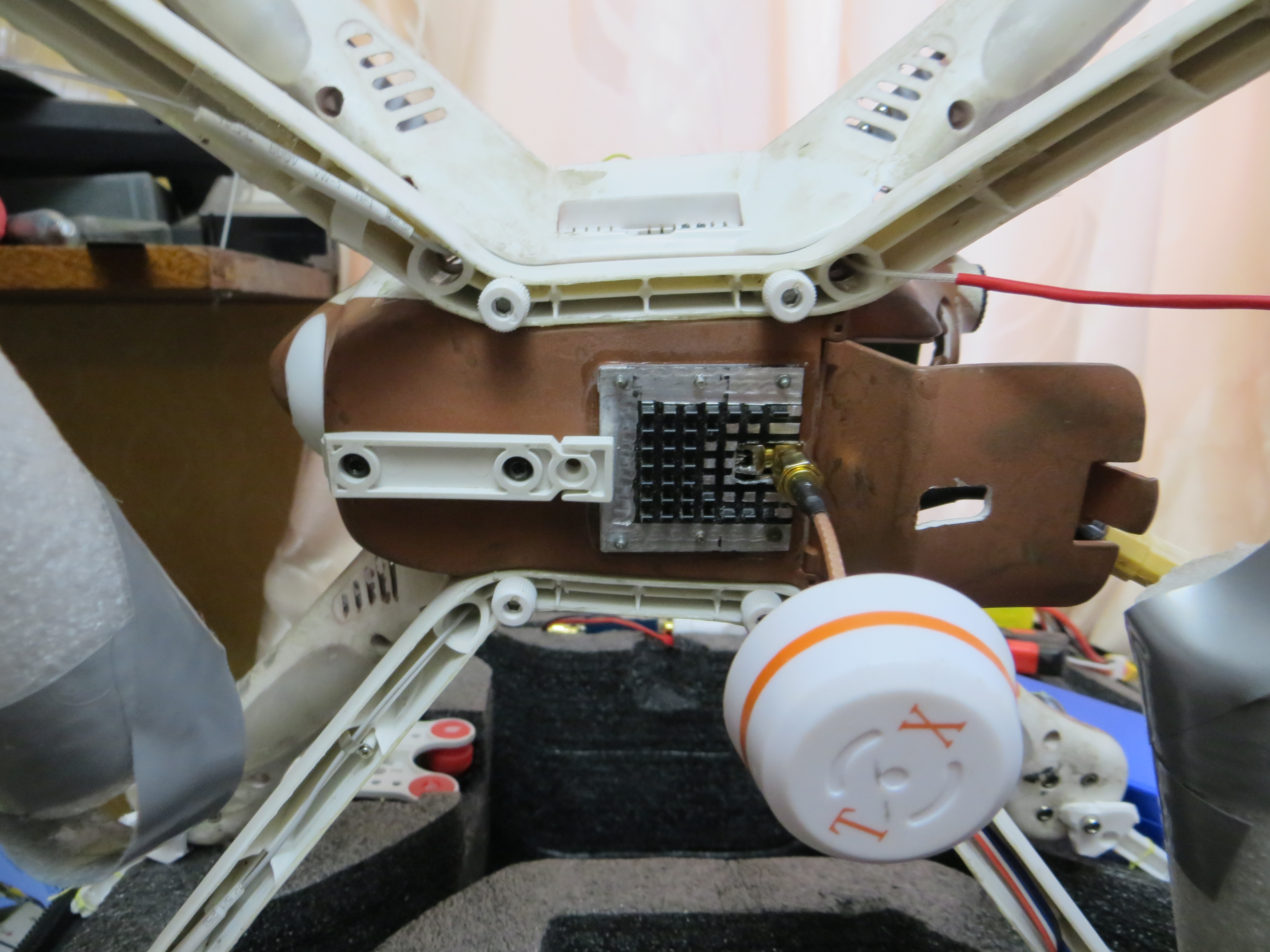
Размещение камеры внутри потребовало пересмотра всей концепции видео: если раньше видеотракт размещался на подвесе, то теперь его нужно разместить полностью в корпусе коптера. После долгих поисков "а куда бы это все засунуть?" остановился на таком варианте:

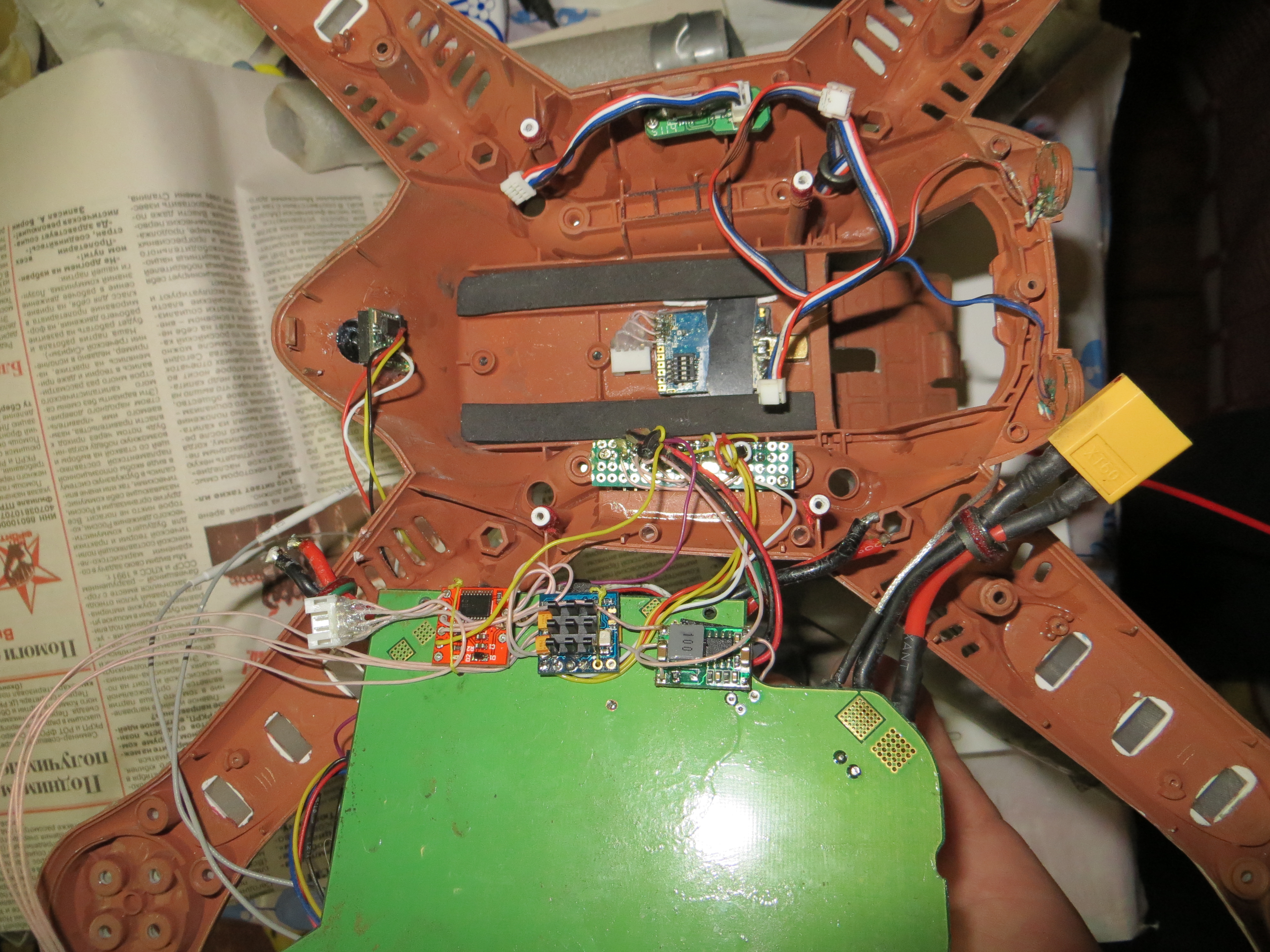
Слева направо - видеокоммутатор, ОСД, стабилизатор 5в, а в отверстии на дне видеопередатчик с дополнительным радиатором, позволившим избавить его от перегрева - температура в покое не превышает 60 градусов. Коммутатор управляется от дополнительного канала OSD, что потребовало некоторой доработки его прошивки.
Модуль ОСД обзавелся радиатором на чипе MAX7456 дабы он не перегревался, сами модули приклеены на двухсторонний скотч и дополнительно зафиксированы кевларовой нитью. Выводы ОСД для программирования и другие нужные сигналы выведены на изрядно подросшую боковую гребенку.

При пробном включении видеотракта были обнаружены огромные полосы на видео от помех, так что были добавлены на питание конденсатор 470мкф и дроссель, разместившийся между платами ОСД и питания.
Чтобы ненароком батареей не сорвать провода, из какой-то пленки сделан ложемент батареи.

Подвергся доработке также и монитор - в нем разместился приемник, ардуина и плата от видеорекордера, так что теперь это diversity-приемник (можно подключить второй внешний, например размещаемый на поворотной платформе), а наземное видео еще и записывается. В роли прошивки Ардуины - слегка доработанный проект RX5808-pro-diversity, избавившийся от грубого ручного переключателя "меню-видео", и просто включающий меню на некоторое время при нажатии на любую кнопку управления. Выход с видеорекордера подключен на второй вход монитора, так что все разместилось как нельзя лучше.
Хоть выглядит и пугающе, зато работает ![]()
После сборки наступила пора настройки - в отличие от родных регуляторов новые требуют калибровки. Процедура - включить пульт, дать полный газ включить коптер, дождаться пока регуляторы отыграют свои мелодии, выключить коптер, включить коптер, дождаться окончания мелодии, убавить газ, дождаться писка регуляторов, готово. Обычно предлагается ее проводить не от батареи а от источника с ограничением тока - дабы регуляторы не спалить если что пошло не так. Вроде ничего сложного, так что приступил я к калибровке тут же. И попал в засаду...
Нет, регуляторы откалибровались нормально - но потом я задеваю пульт, перемещая газ... моторы запускаются, и блок питания уходит в отсечку. Через долю секунды блок питания снова дает ток, коптер включается - и регуляторы решают перекалиброваться с каким-то случайным положением газа. В результате минимальный уровень газа оказался выше середины диапазона, и на полном газу моторы только еле вращаются. А входить в режим калибровки снова регуляторы отказались напрочь...
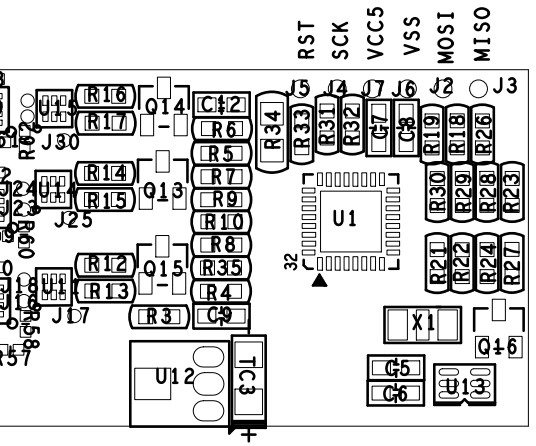
Ну ладно, кто виноват понятно, но - что теперь делать? Возвращать родные регуляторы не хотелось, остается попробовать стереть EEPROM регуляторам дабы сбросить результаты ошибочной калибровки, благо площадки для ISP-программатора предусмотрены.
И тут я вспоминаю, что когда-то мне попадалась крайне интересная информация: оказывается, разработчиком очень многих коптерных железок является один человек - владелец сайта myairbot.com, и при этом даже идет на контакт, отвечая на задаваемые вопросы! Лезу на этот сайт - и точно, у него на сайте есть такие регуляторы! Пишу ему в личную почту на rcgroups - и тут же получаю ответ не только с цоколевкой регулятора (выводов для программирования), но и с типом используемой прошивки SimonK, и даже советом перешить их на прошивку BlHeli! Итак, ценная информация в одной куче:
- прошивка SimonK bs_nfet.hex
- прошивка BlHeli BlueSeries_20A_multi.hex
- площадки программирования (шаг 2мм)

Быстро делаю из подручных материалов клипсу на разъем программирования, скачиваю BLHELI Suite - замечательнейшую программу для программирования и настройки регуляторов - и дождавшись, когда семейство уйдет погулять, приступил к Тайному Обряду Перепрошивки ![]()
Мероприятие прошло на удивление гладко - регуляторы прошились, откалибровались по стандартной процедуре, причем у всех совпали калибровочные значения. Ляпота!


Теперь можно и в воздух! Собираю коптер, складываю все в коптерный чемодан, и на ближайшую полянку, подальше от народа.
Хоть мы и пытались забраться в малолюдное место, но откуда-то прибежали дети, так что полеты пришлось прекратить раньше времени. Но все равно результат понравился - коптер висит гораздо стабильнее и на меньшем положении газа, нет раскачки при снижении и по ощущениям даже управляется как-то увереннее. Особенно в сравнении с его поведением на тех же винтах с родными моторами и регуляторами
Камера дает неплохую картинку, монитор ее пытается показать (хотя днем плохо видно) и записАть (правда в хреновом качестве но координаты видно).
Вобщем, апгрейд удался!
И в заключение - небольшой бонус: настройка пульта DEVO10 на работу со благоприобретенной телеметрией.
Как установить предупреждение по напряжению ходовой батареи:
Model menu > Sensor setting, установить Status в Active;
Шаг вниз (кнопа DN) и нажимаем ENT пока не будет отмечено Voltage;
Шаг вниз (кнопа DN) до External V1 и меняем значение справа с Inhibit на Active (используя кнопку L);
Нажимаем DN пока не будет отмечено значение напряжения;
Устанавливаем это значение в 10.5...10.7 вольт (кнопками R/L).
Как установить автостарт полетного таймера по стику газа:
Model menu > Stick position switch, задаем:
Switch выбираем SPPS0 SW;
Channel - Throttle;
Position - L90%;
On - High
Затем
Function menu > Timer, устанавливаем:
Type выбираем Stopwatch;
Switch - SPS0 SW.
Готово! Теперь на пульте будет отображаться время полета, а по разряду батареи пульт начнет пищать. Осталось только выучить разные мелодии его пищалки ![]()





Выехали мы на 9 мая сморчки поискать да полетать малость. Сначала моросил дождик, потом перестал и таки удалось подняться воздух.
Первые 2 батареи отлетали "на ура". Удалось оглядеться по сторонам и малость поснимать весенний Сим.
Поставив 3-ю батарею, я решил слетать на соседнюю полянку и посмотреть куда уходит дорога. Взлетел над деревьями на высоту метров 50-60, и полетел в ту сторону. И только я перелетел через лужу, как в очках пропало видео, а вдали раздался довольно громкий БУМ!
Так как я летел над дорогой, найти коптер не составило труда. Он лежал на спине, камера, подвес и остальные детали лежали рядом и изображали бусы, нанизанные на кевларовую нитку.
Повреждения:
* Трещины в корпусе в 2-х местах.
* погнуло детали подвеса. Выпрямить удалось, но при выпрямлении алюминий лопнул в самом тонком месте.
* снесены все фиксаторы, обеспечивавшие жесткость корпуса.
* сломана лопасть одного винта.
* в дребезги разлетелась деталь крепления подвеса к коптеру - похоже она и смягчила основной удар.
* несильно погнулись металлические элементы - гайки для болтиков стяжки лучей.
Других повреждений пока не обнаружено. К моему удивлению, хоть распредплата и приняла на себя удар батареей, но осталась на месте и целой. Так что доработка корпуса определенно помогла.
Причина падения - батарея отключилась в воздухе где-то внутри (а разве так бывает?), съемка видео прекратилась до падения.