

 1342
1342Оторваться от земли
26 июня 2015, 09:21 | С высоты Автор: Night_Ghost
Меня почему-то никогда не привлекали пещеры, наоборот, всегда тянуло ввысь. Но если в детстве можно не задумываясь запихнуть собственную тушку в богопротивный ЯК-52 и отдаться на волю инструктора, а потом даже самому рулить этой тонной летающего железа, то почему-то с возрастом такая развлекуха начинает казаться эээ бредом вобщем. Поэтому, как завещал нам один лысый засланец - "мы пойдем другим путем!".
Ну на самом деле, можно же поднять в небо фотик/видеокамеру! Я давно слежу за разнообразными летательными штуковинами, но еще 3 года назад цены были несравнимо выше - порой больше чем на порядок. Но потом вышел Фантом от DJI, который оказался настолько удачным квадрокоптером, что начался настоящий "фантомокоптерный бум" - множество китайских фирм выпустила свои копии Фантома, и даже нашлись те кто выпустил копии этих копий. Все это привело к многократному снижению цен, и на них стало можно смотреть (почти) без ужаса ![]()
 Вот на одном из вроде бы клонов Фантома мы и остановились - на "Walkera-x350 pro" в комплектации RTF (Ready To Fly) - готов к полету. Хотя клоном его можно назвать с большой натяжкой - корпус имеет совсем другую форму, своя проверенная временем система управления, а главное - автопилот у этой "подделки", в отличие от оригинала - настоящий Ардупилот (версия для мультироторных платформ - Ардукоптер), открытая и самая продвинутая на настоящий момент разработка, позволяющая практически ВСЕ! Полет по заранее заданным точкам, режим "лети за мной", и прочая прочая. Плюс возможность получать на земле всю телеметрию (как на отдельном экране так и на видео). Ну и к тому же комплектация за примерно те же деньги наиболее интересная - в комплекте, помимо самого коптера и 10-канальной системы управления, идет еще и подвес для камеры со стабилизацией положения. Как там у классиков - китайцы вместо мексиканского тушкана подсунули шанхайского барса
Вот на одном из вроде бы клонов Фантома мы и остановились - на "Walkera-x350 pro" в комплектации RTF (Ready To Fly) - готов к полету. Хотя клоном его можно назвать с большой натяжкой - корпус имеет совсем другую форму, своя проверенная временем система управления, а главное - автопилот у этой "подделки", в отличие от оригинала - настоящий Ардупилот (версия для мультироторных платформ - Ардукоптер), открытая и самая продвинутая на настоящий момент разработка, позволяющая практически ВСЕ! Полет по заранее заданным точкам, режим "лети за мной", и прочая прочая. Плюс возможность получать на земле всю телеметрию (как на отдельном экране так и на видео). Ну и к тому же комплектация за примерно те же деньги наиболее интересная - в комплекте, помимо самого коптера и 10-канальной системы управления, идет еще и подвес для камеры со стабилизацией положения. Как там у классиков - китайцы вместо мексиканского тушкана подсунули шанхайского барса ![]()
Так что ситуация на рынке мониторилась довольно давно, вот только перипетии курса рубля оставили неизгладимое влияние - но так или иначе к мы его заказали (тут - я обещал продавцу ссылку, таки ж он не виноват в том что родной GPS глючен до невозможности!). А пока оно ехало, был "скачан и изучен весь интернет" (С), особенно различные форумы. И по первому впечатлению... ну АБСОЛЮТНО ничего не понятно! Говорят там между собой на своем "птичьем языке", в одном предложении называя одну деталь разными словами! И при этом - прекрасно понимают друг друга... Ну дык мы-то тоже не слабонервные, а ну составлять словарь!
Вобщем, хоть порог вхождениия и оказался весьма ощутим, но таки удалось его перешагнуть. До того уровня, когда предложения типа "надо ставить ESC без BEC а мозг кормить от UBECа" стали восприниматься в оригинале, без словаря. И только после этого начинать изучение "народных мудростей"...
- и результаты оного изучения отнюдь не радовали. Необъяснимые улеты без объявления войны и падения в штиль, неадекватное поведение, поломки на ровном месте - в общем, RTF не в смысле "готова к полету" - а "Rush To Flyaway" - "рвущаяся улететь". Нда, "экую гангрену наш Ваcька отхватил" (С).
самое запомнившееся
Ну шутки в сторону, деньги уплочены - пора и за дело браться. А для начала определить, как говорится, цели, задачи и пути их достижения.
Чтобы отправить видео с борта на землю, нужен передатчик. Для таких применений выделено два диапазона - 1.2ГГц и 5.8ГГц, но 1.2 дает помехи на аппаратуру управления, работающую на частоте 2.4ГГц, и выбор диапазона резко сокращается. А еще родная аппаратура связи - односторонняя, и чтобы знать хотя бы напряжение на батарее на борту нужно поставить передатчик телеметрии, который будет передавать кучу полезной информации с борта на землю. Выпускаются они на разные частоты, но у нас незаконны все кроме 433МГц, так что опять же выбор небогатый.
Итак, на борту должны разместиться два передатчика, и два приемника - управления и GPS. А ведь коптер - не самолет, и разнести антенны на концы крыльев и хвост, как это принято делать, тут невозможно - все они будут работать не только в ближних зонах друг у друга, но и в непосредственной близости от остальной электроники! А значит - будут наводки, наводки и еще наводки...
Вообще-то любая ВЧ техника старается избежать электромагнитных наводок, как принимаемых так и излучаемых, отчего ограждается от внешнего мира металлическими (либо металлизированными) экранами. Хоть самые дешевые планшеты с телефонами, хоть автонавигаторы, хоть другая высокочастотная электроника - у всех пластик корпуса металлизирован изнутри, а землю всех деталей соединяет металлизированный скотч. Тут же ВСЕ_ПЛОХО! И сам корпус, и корпуса внутренних модулей просто пластиковые, без малейшего намека на экранирование. Более того, крупные узлы - в первую очередь регуляторы моторов - не отделены по синфазной составляющей! А ведь широко разнесенные лучи с моторами - отличный диполь для какой-нибудь подходящей частоты...
Так что пока ОНО ехало, были заказаны и некоторые штуковины для преодоления этих безобразий, а также все необходимое для видео и телеметрии.
Конечно, я совсем не разбираюсь в лета(те)льных игрушках. Зато я неплохо разбираюсь в микроконтроллерах, ВЧ технике и прочей электронике. А также в программировании всего этого, ну и в авиации малость. Поэтому пристальное ознакомление с констрАкцией повергло меня в полный ужас. Нет, УЖАС-УЖАС-УЖАС!
Почему? Про то подробности. И начнем с того, что квадрокоптер представляет собой этакий летающий вычислительный центр. Ибо каждый узел в нем содержит свой микроконтроллер (а то и несколько), в результате "из коробки" на борту аж 8 процессоров, каждый со своей программой (после доукомплектовывания коптера разной авионикой число процессоров возросло аж до 12, не считая процессора видеокамеры). А процессоры могут сбиваться от помех по питанию, зависать от неверной работы периферии, терять состояние во время сброса и прочая прочая.
Когда же я заглянул в исходный код основного контроллера (да, опенсорс это ОЧЕНЬ хорошо!) то остатки лысины на моей голове просто встали дыбом! ,Весь, ВЕСЬ код просто испещрен вставками
if(чтототам) hal.panic()
Не, я помню тот анек - "ну нишмагла я, нишмагла" - но причем тут МОЙ коптер?!! Ибо оный panic() реализуется очень просто. Слишком просто. Недопустимо просто.
Вот так: for(;;)
НУ то есть - прощай полет привет земля..."ни шмагла я" может случиться от неверного ответа по шине (файл AP_InertialSensor_LSM9DS0.cpp строка 424), от ошибки загрузки параметров (pahameters.pde:550), ошибки записи на флешку (DataFlash_APM2.cpp:106), от зависания акселерометра (AP_InertialSensor_MPU6000.cpp:474) и в сотнях других мест. И ладно бы такое происходило только во время предполетной подготовки...
Можете ли Вы себе представить, чтобы контроллер управления двигателем автомобиля (а в любом инжекторном автомобиле управление впрыском и зажиганием осуществляется специализированным контроллером) вел бы себя похожим образом?! РРРаз - и выключаем все управление, и руль вбок до упора ![]() В реальности контроллер впрыска может пережить потерю практически всех датчиков и сохранить работу мотора, и всего лишь загорится лампочка "проверьте двигатель". И даже зависание самого контроллера приводит всего лишь к пропуску одной вспышки - по сторожевому таймеру контроллер перезагрузится, подхватит состояние до зависания, проверит и возможно исправит найденные ошибки, и продолжит работу.
В реальности контроллер впрыска может пережить потерю практически всех датчиков и сохранить работу мотора, и всего лишь загорится лампочка "проверьте двигатель". И даже зависание самого контроллера приводит всего лишь к пропуску одной вспышки - по сторожевому таймеру контроллер перезагрузится, подхватит состояние до зависания, проверит и возможно исправит найденные ошибки, и продолжит работу.
А ведь коптер - это не автомобиль и даже не самолет! Самолет - он сам летит! Поставил управляющие поверхности в среднее положение, мотор выключил - он будет тихо и спокойно планировать кругами пока не сядет. Коптер же без контроллера - это просто набор разных железок, о полетах даже не мечтающий! Он может жужжать, дуть и переворачиваться - не более, поэтому даже когда коптер летит в так называемом "акробатическом" - минимально автоматизированном - режиме, всем управлением все равно занимается контроллер! Задача-минимум - разложить 4 традиционных самолетных канала управления, поступающих с пульта - крен, тангаж, руль и газ - в режимы работы 4-х двигателей. Так что в случае любых проблем контроллера коптер гарантированно окажется на земле, в лучшем случае камнем с выключенными моторами, в худшем - на полетной тяге беспорядочно кувыркаясь и изображая взбесившуюся мясорубку.
За примерами таких падений далеко ходить не надо - достаточно на ютубе задать поиск "квадрокоптер упал". Навскидку - раз, два, три. Печаль ![]()
Ка бы то ни было, к концу новогодних каникул ОНО ПРИЕХАЛО! Конечно же, сразу после получения мы выехали произвести проверочный полет, чтобы убедиться что все работает, а во избежание авиакатастроф коптер, в лучших традициях вертолетостроения, был привязан за ногу веревочкой: с высоты 1 метр падать безопасно.

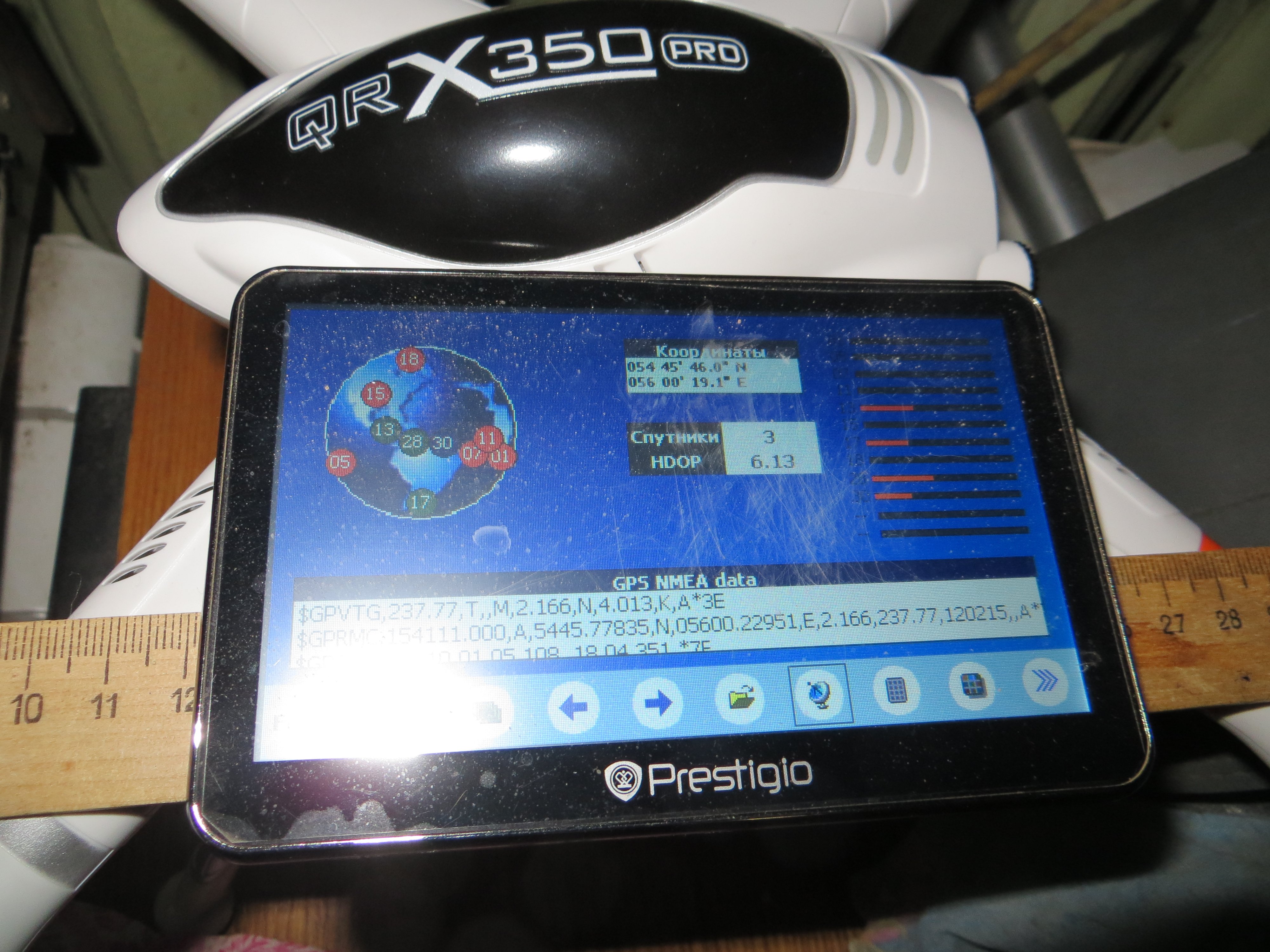
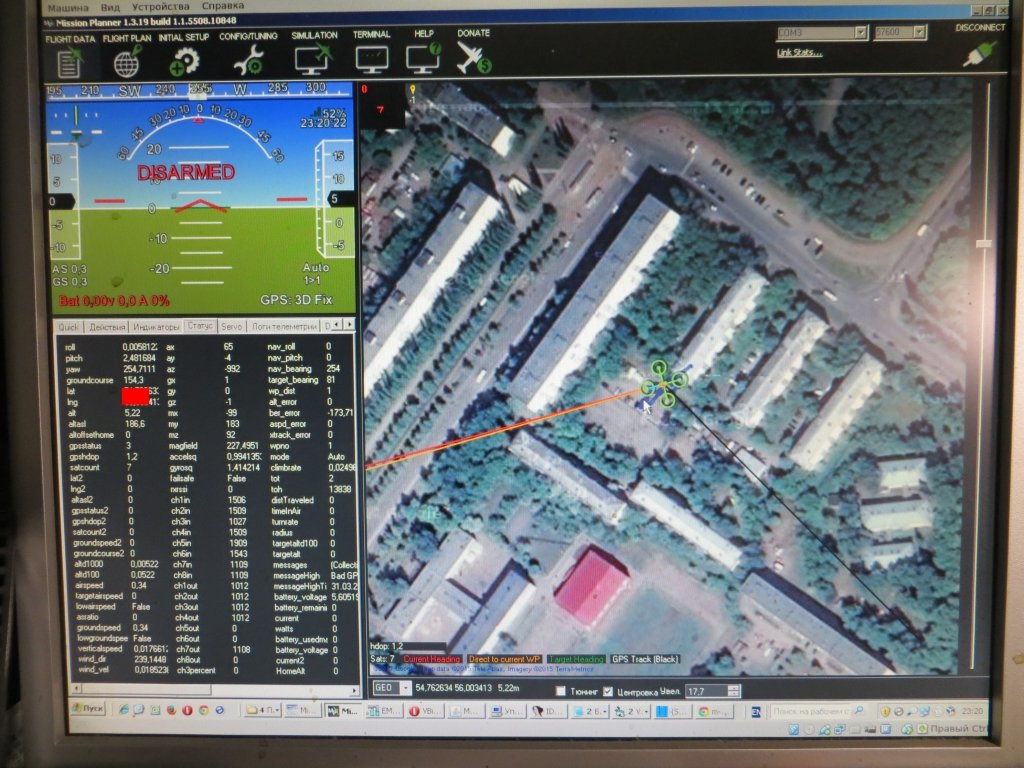
Но неожиданно с этим полетом возникла первая проблема. По инструкции коптер должен обнаружить спутники и мигать о их количестве правым светодиодом, в реальности миганий не было, соответственно полетный контроллер разрешения на взлет так и не дал. Пришлось возвращаться домой и подключать коптер к компьютеру с MissionPlanner - программой настройки и диагностики полетного контроллера с софтом Ардупилот.

И все стало понятно - большими красными буквами на экране "Bad GPS helth", приболел значит GPS. Это подтвердило и длительное выкладывание включенного коптера на балкон - он так и не смог поймать спутники, хотя даже дешевые китайские телефоны, лежащие рядом, наловили их целую кучу.
О ситуации мы сообщили продавцу, и после некоторой бурной дискуссии вопрос с GPS был решен к обоюдному согласию. А тем временем в коптере отключили проверку GPS перед взлетом и таки подняли его в воздух на метр.
После первого полета было заказано еще некоторое оборудование, а весь квадрокоптер был тщательно разобран для доработок.
Список оборудования
Начинаем делать правильно. В первую очередь - корпус. Сначала вклеивается тонкая стеклоткань в точки концентрации напряжений, а также под болты моторов, где пластик корпуса подогрет да еще и работает на разрыв, отчего иногда трескается, и мотор вываливается из луча.


Стойки крепления, в которые вворачиваются шурупы, обматываются ниткой на клею - теперь они не потрескаются от вибрации.
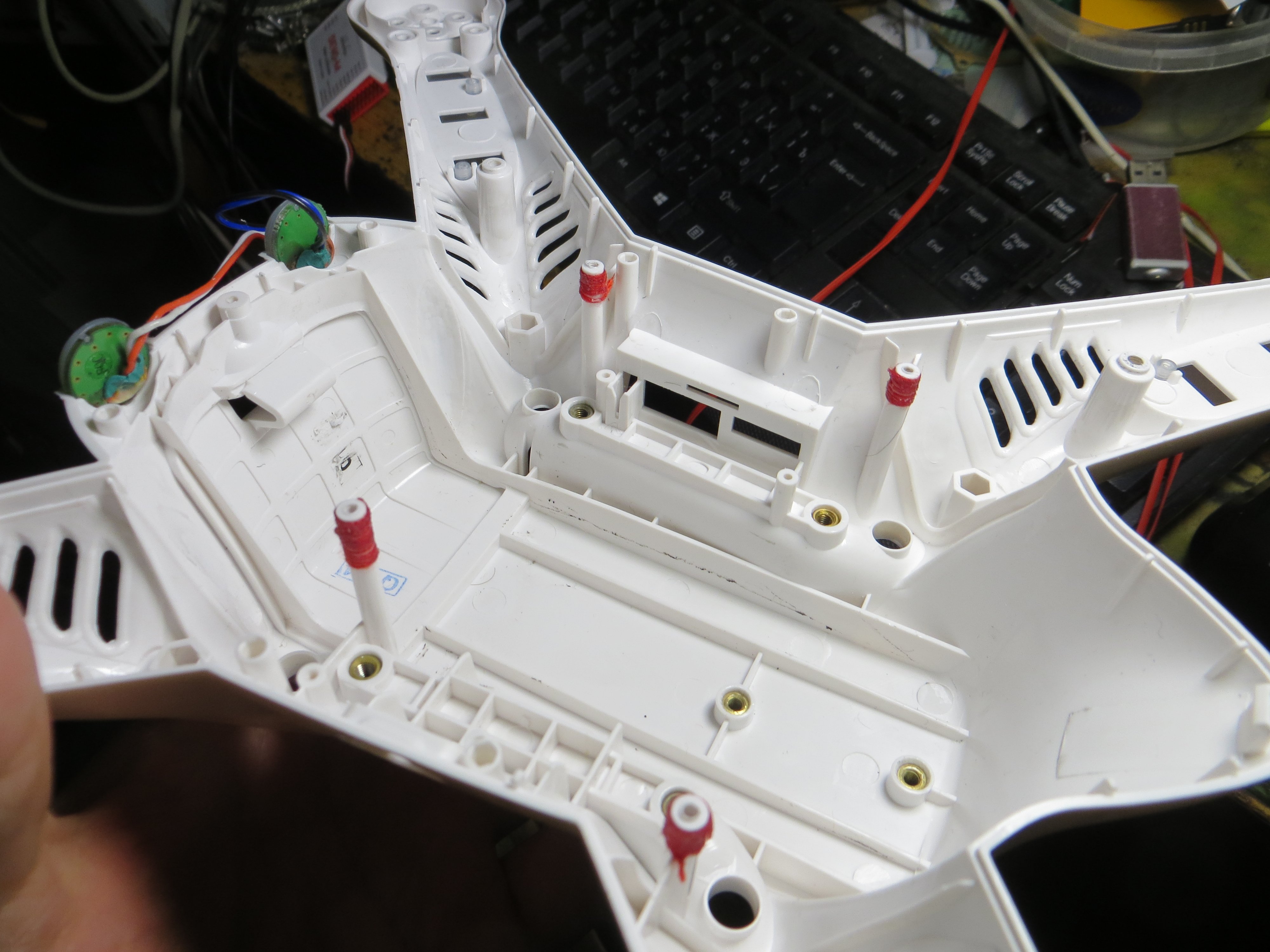
Также стеклонитью армируется нижняя сторона ног. Ноги вообще сконструированы неправильно, нижняя сторона работает на разрыв, но при этом сделана очень тонкой и заостренной, что провоцирует рост трещин. Стеклонить же берет на себя усилия разрыва, а на сжатие ABS-пластик (а именно из него сделан весь корпус) работает довольно неплохо.
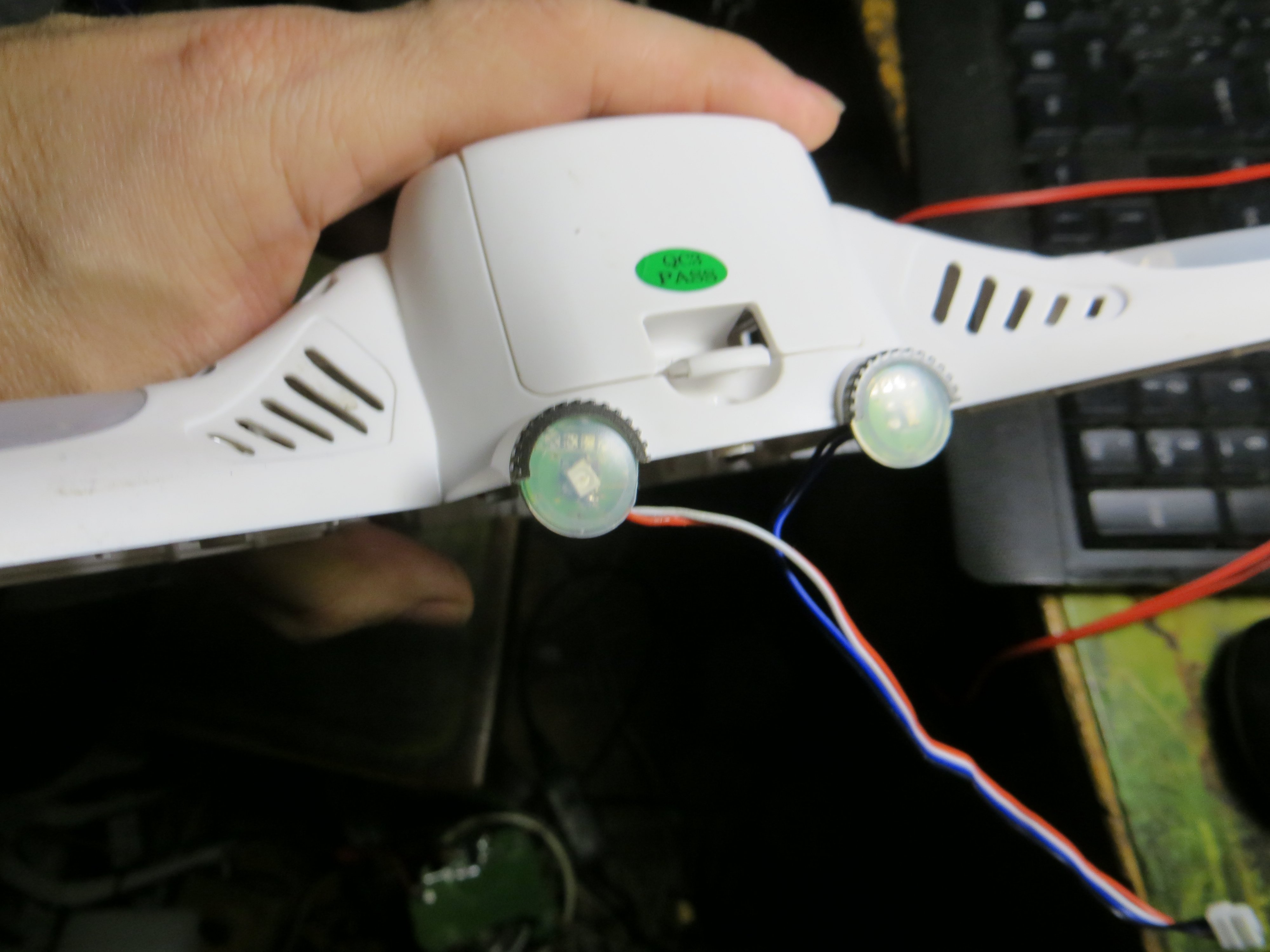
С завода почему-то оба светодиода "глаз" почему-то одного цвета. И если на земле можно отличить какой из них замигал, то в воздухе уже в десятке метров левый от правого отличить невозможно. Поэтому правый диод был заменен на красный, хоть какое-то разнообразие ![]()
Затем - защита корпуса от наводок. Для этого предназначена специальная "краска от помех", содержащая мелкодисперсную медь и полиацетилен (проводящий пластик). Имя ей - EMI-35. Проверено, она образует на поверхности проводящий слой с очень малым сопротивлением (доли ома на сантиметре), отчего внутрь корпуса помеха не пройдет. Конечно же, если еще и соединить все части корпуса вместе с помощью электропроводного скотча. Если бы в "матрице" (помните еще такой фильм?) машины были правильно подготовлены, то нипочем бы им были те электромагнитные мины!


От покраски на корпусе надо защитить направляющие элементы (иначе будет туго собираться/разбираться),стойки платы и отверстия светодиодов, для этого достаточно приклеить к ним кусочки пластилина.
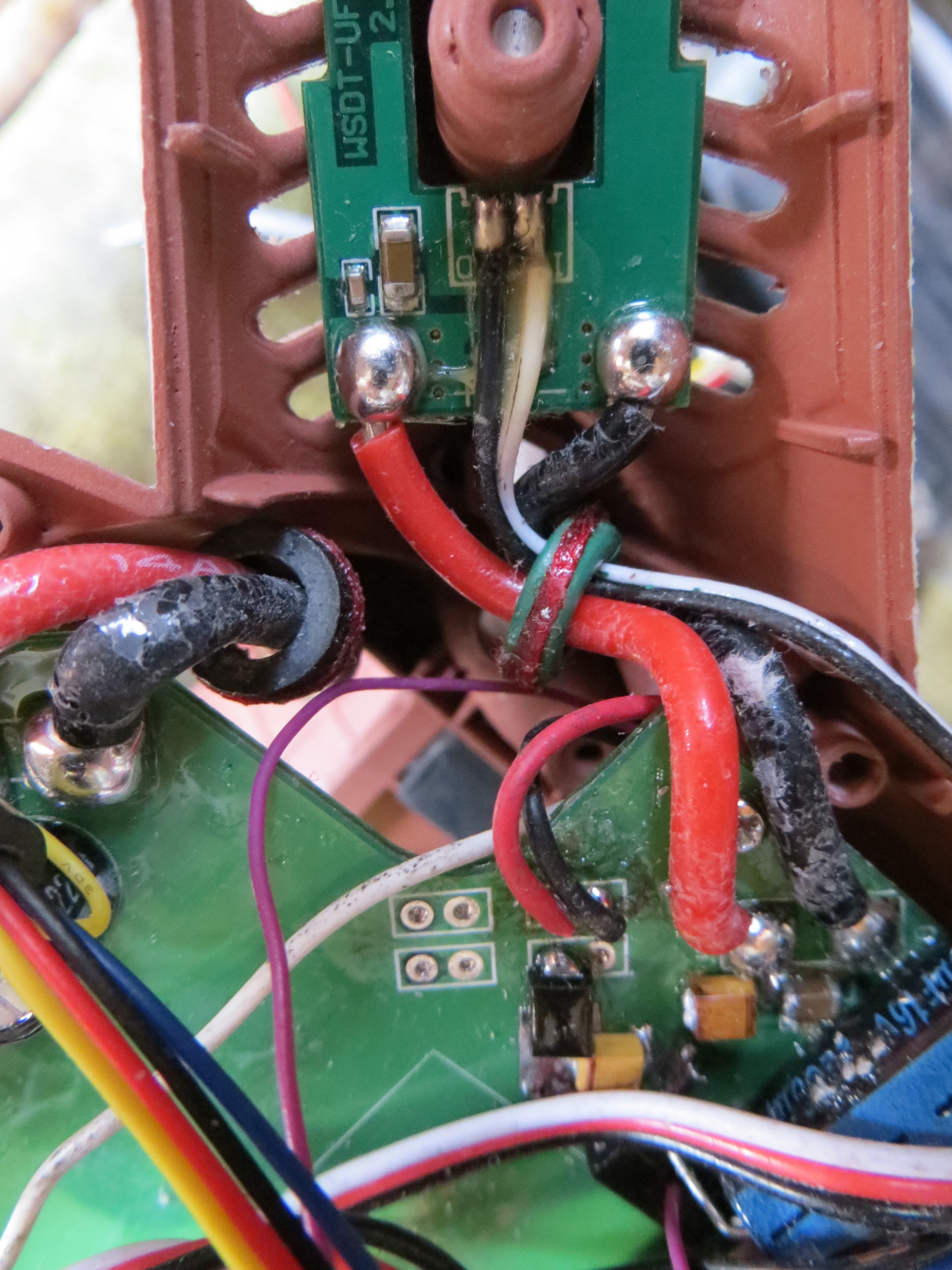
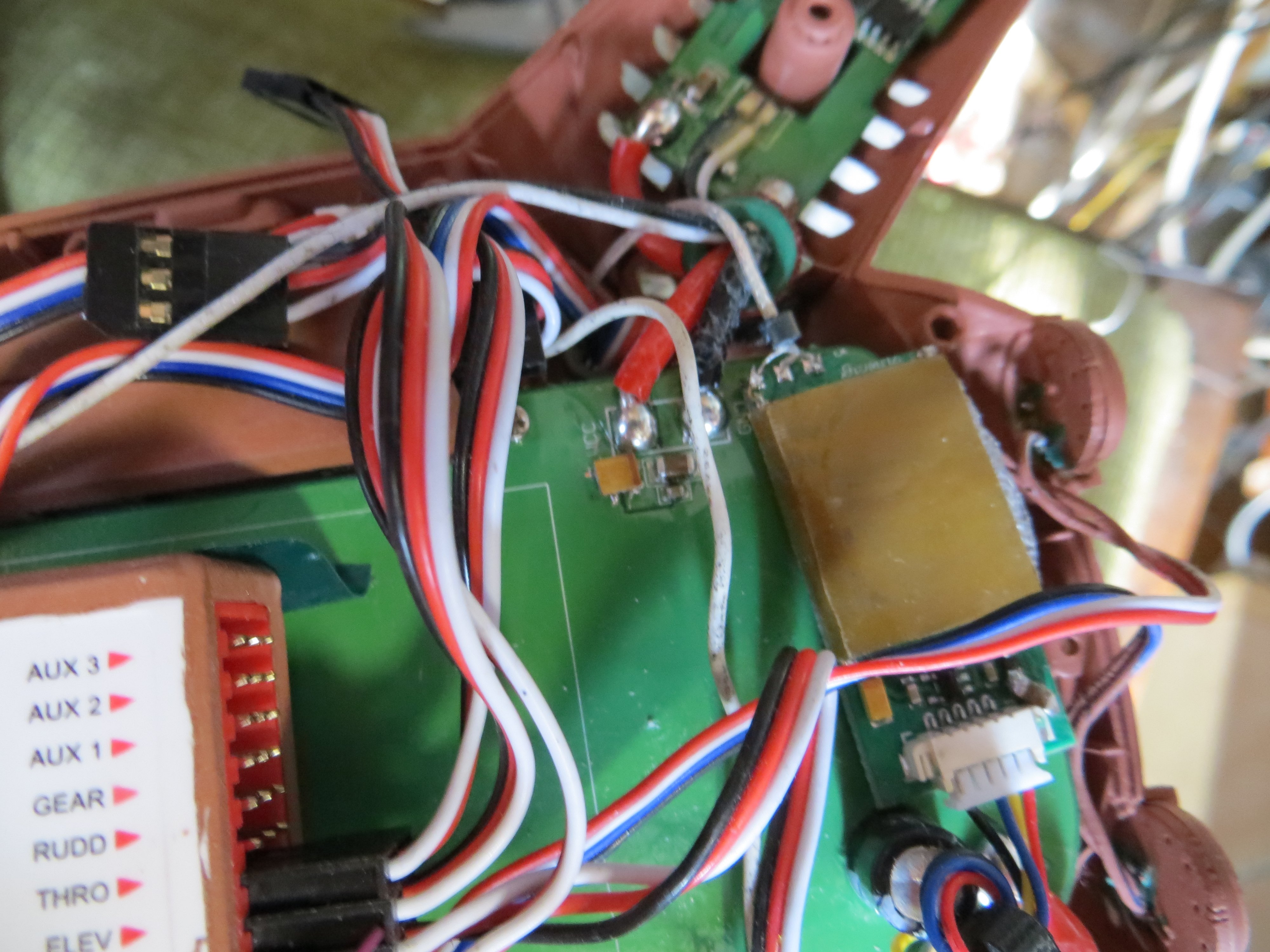
Полетный контроллер и приемник разбираются и немного дорабатываются - вместо перемычек или в разрез дорожки питания на входе и выходе ставятся ферроблоки (дросселя), и дополнительные конденсаторы на землю.


Все платы (приемник, контроллер, регуляторы моторов, основная плата и контроллер подвеса) обрабатываются лаком в два слоя, естественно с предварительной защитой разъемов. Сырость - бич любой электроники... сначала влажность оседает тонким слоем на плате, потом под микросхемами начинается коррозия, а потом - всю плату в помойку, ибо стоимость ремонта превышает стоимость новой. А ведь коптер такого размера летать должен под открытым небом, где иногда случаются всяческие дожди, туманы и облака! Вот для борьбы с оным безобразием давно придуман и продается простой аэрозольный состав под названием "пластик-71", покрывающий плату прочным и эластичным покрытием. "ПШИК" пару раз на плату - и никакой коррозии! Обработанные им платы выдерживают даже кратковременное погружение, отряхнулся и дальше побежалполетел.
Корпуса приемника и автопилота тоже покрываются защитной краской снаружи и изнутри, не забыв закрыть надписи и те точки корпуса, которые касаются платы. Последнее я сделать забыл, за что поплатился уехавшим измерителем напряжения батареи: оказывается эта краска действительно электропроводна! - и замкнула контакты на плате. После очистки от лишней краски все вернулось в норму.
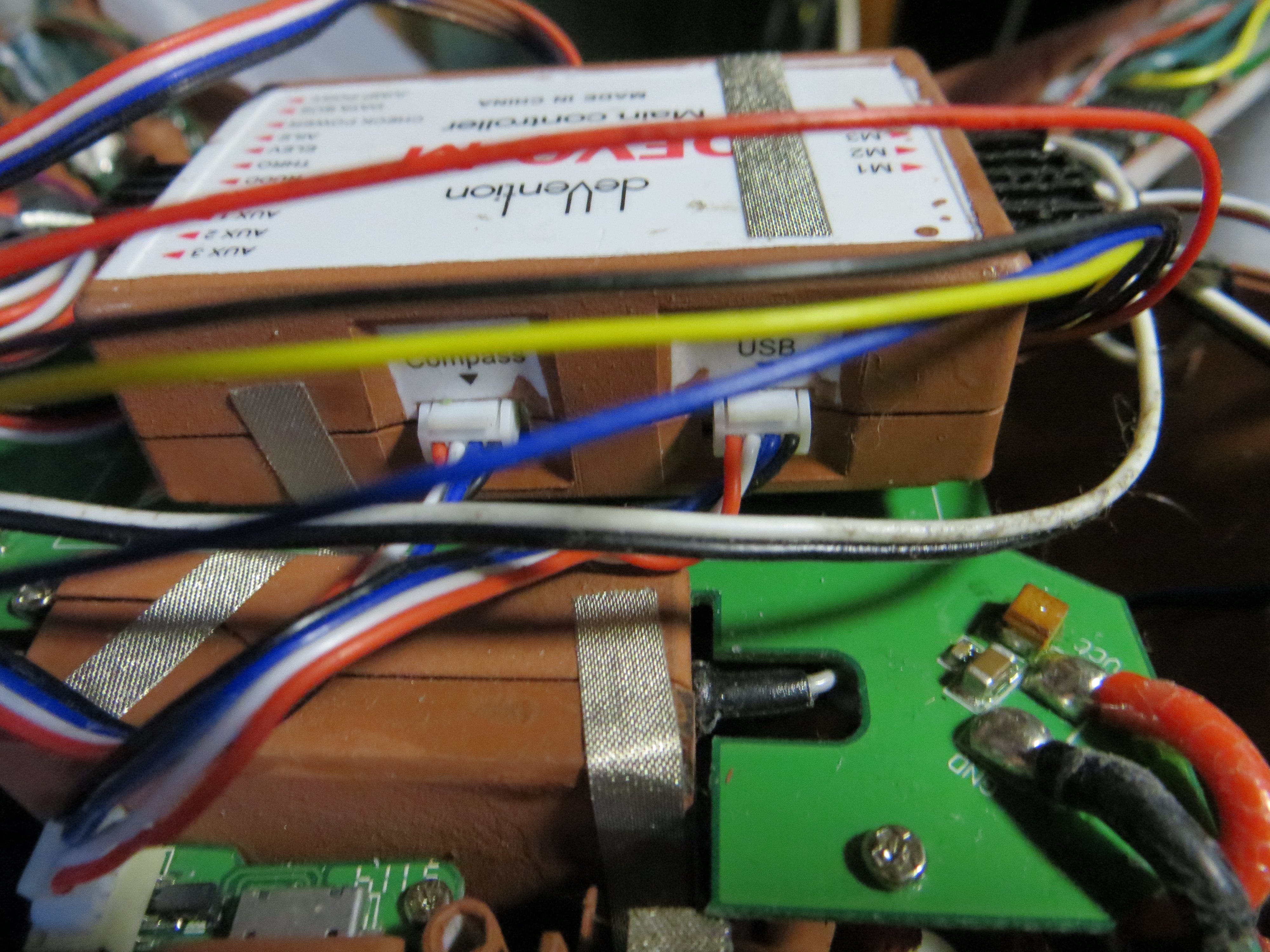
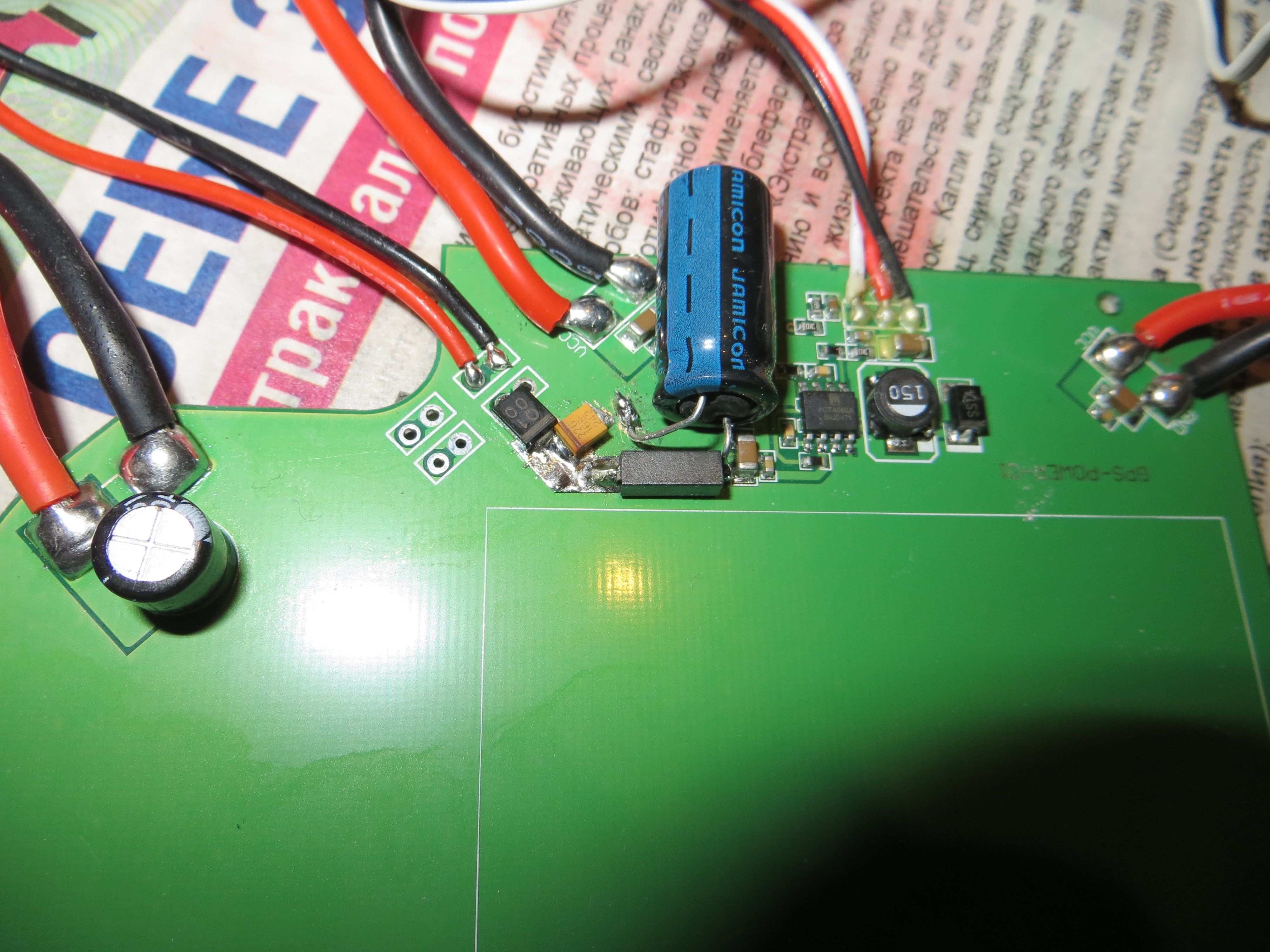
Схема питания на основной плате была переделана - добавлены дроссель, диод и конденсатор большой емкости. В результате получился этакий "бесперебойник" на секунду работы контроллера - теперь ему не страшны просадки напряжения на разряженном аккумуляторе.
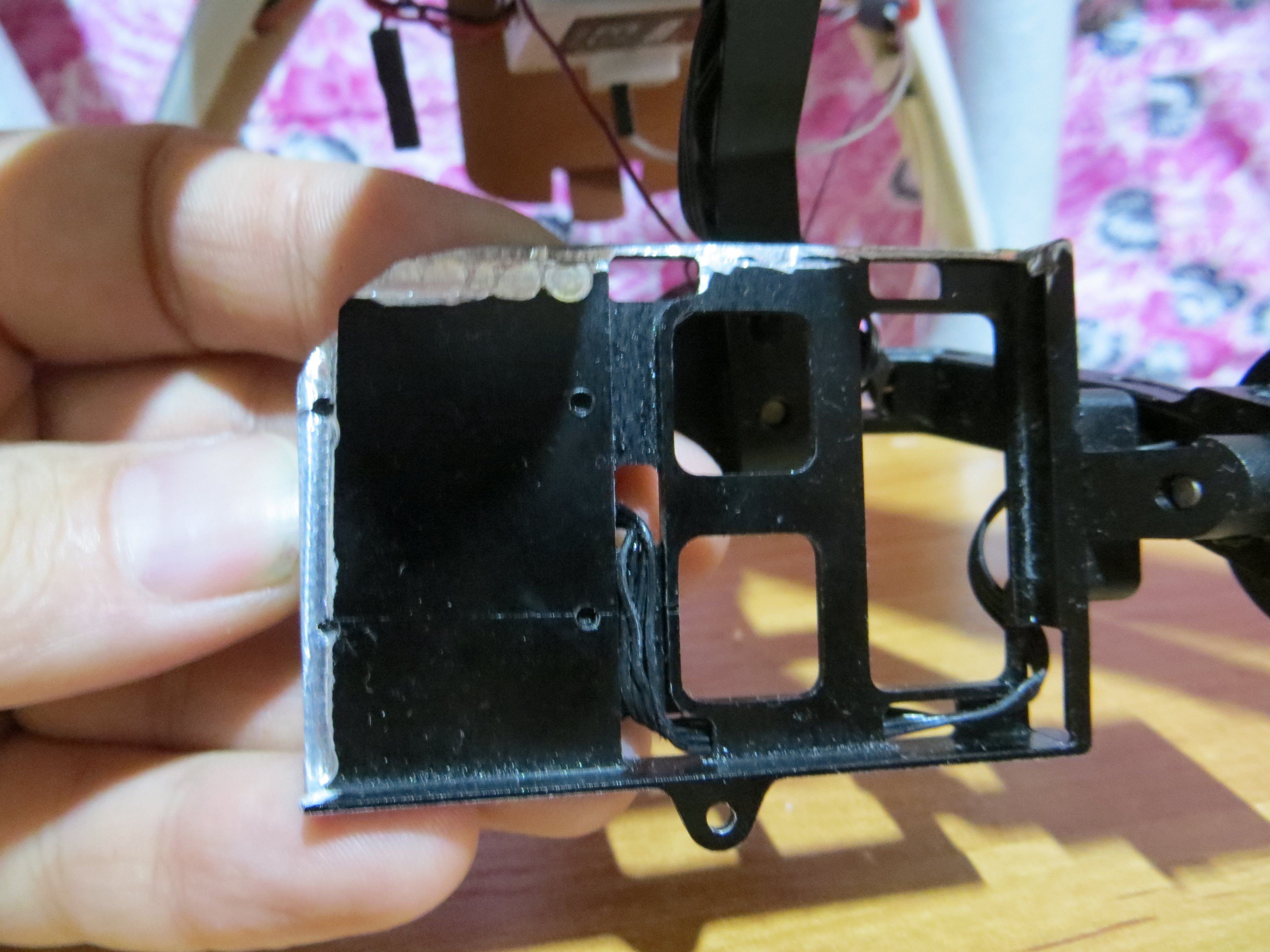
Не понравилось как проходят провода от моторов - прямо над слаботочной частью регулятора, поэтому был сделан экран для защиты от наводок.
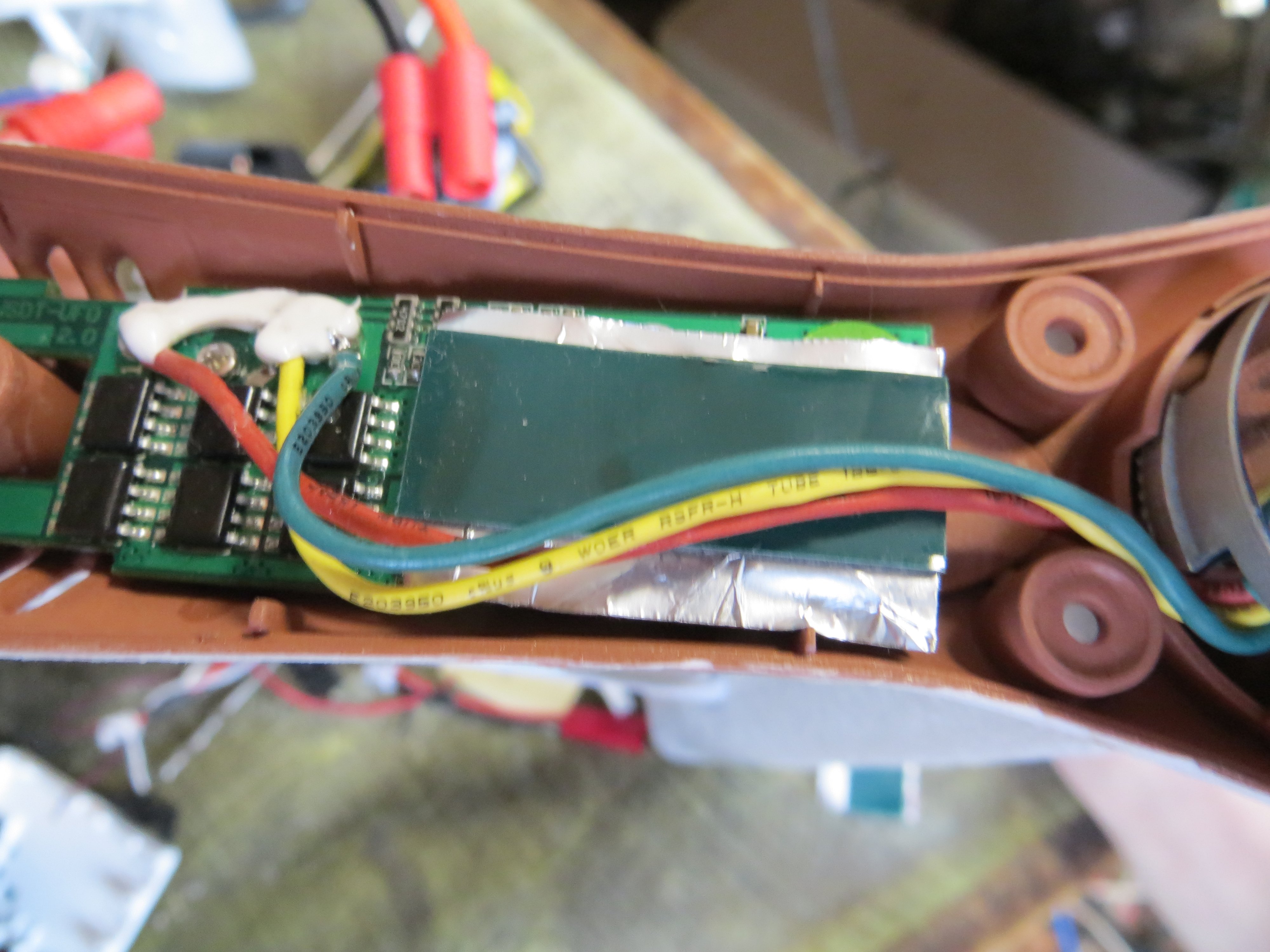

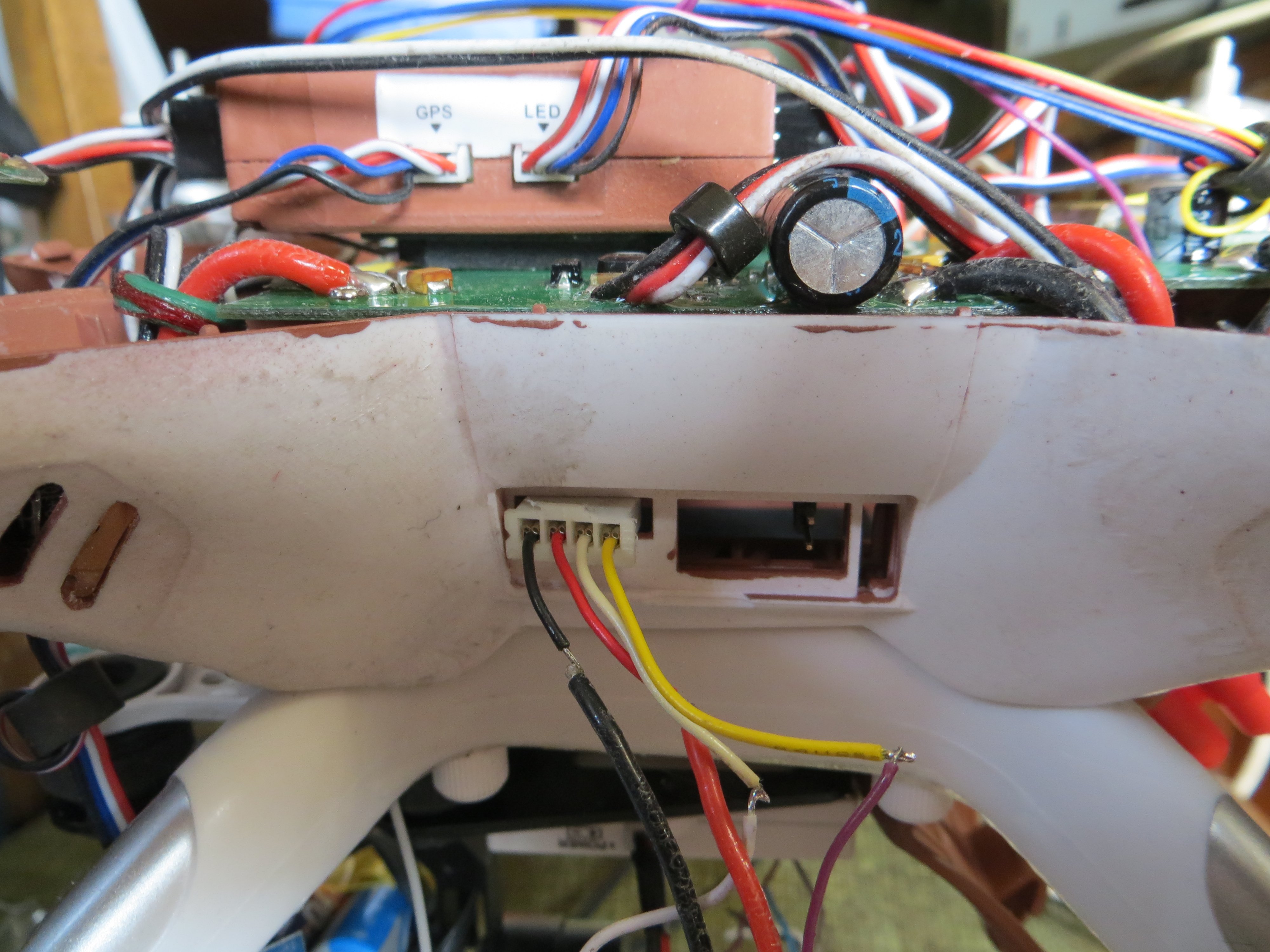
На все провода, выходящие из корпуса, надеты ферритовые кольца для защиты от синфазной помехи - например наводок с передатчиков. Также кольца надеты на провода к батарее и к регуляторам, а то торчащие в стороны моторы с регуляторами подозрительно напомнили диполь. Ну и естественно на провод модуля GPS - он расположен за экраном, и надо не пропускать помехи по проводу.
Заказан был новый модуль GPS на чипе MTK 3333, мультисистемный - умеет приводить данные и американской NAVSTAR (той системы что обычно называют GPS), и нашей GLONASS к единому датуму, и определять координаты по любому набору спутников. И при этом он даже заметно легче родного!

Сразу по приезду нового GPS модуля он сразу был подключен к компу для проверки. Вот это да! Даже лежа заметно глубже внутрь комнаты от того места, где родной модуль так и не смог поймать спутники, этот наловил аж 7 штук и получил HDOP всего 2! Красота, да и только ![]() Осталось малая малость - подключить его к коптеру.
Осталось малая малость - подключить его к коптеру.
"А включаешь - не работает" (С). Наличие GPS контроллер видит, а фикса все нет и нет... Прям-таки дежа-вю - родной-то GPS вел себя так же... Но ведь новый модуль только что работал!
Приходится аккуратно подсоединяться к линиям передачи и земле, дабы подслушать, что GPS говорит контроллеру. Втыкаю разъем, "cat /dev/ttyUSB2", а там:
$GNVTG,65.85,T,,M,0.47,N,0.87,K,A*11
$GNRMC,084313.000,A,60XX.8156,N,07600.2569,E,0.XX,65.76,220315,,,A*4A
В переводе с NMEA на человеческий - есть фикс, есть - и все просто замечательно. Почему же контроллер его не видит? (Отмечу в скобках, что судя по этому логу компания Валкера таки исправила багу ардупилота при работе по протоколу NMEA)
Для выяснения этого пришлось залезть в исходники Ардупилота (в который раз порадовавшись их наличию!). Ответ оказался простым и банальным: Ардупилот ждет от приемника сообщений формата NMEA0183 версии 2, а приемник-то умный и современный, он же ГЛОНАСС умеет! И поэтому передает координаты в формате того же NMEA но версии уже 4 - а в ней такие универсальные координаты идут с префиксом не $GP, а вовсе $GN! Понятно что контроллер, ожидающий $GPRMC, сообщение $GNRMC принимать не соглашается...
Если бы в квадрокоптере стоял настоящий Ардупилот, то дело можно было бы считать закрытым - достаточно было бы поменять в исходнике GP на GN в трех местах, и все бы завелось. Однако фирма Walkera в лучших китайских традициях нагло наплевала на лицензию GPL и исходниками делиться не собирается, загрузчик залочен а бинарник прошивки зашифрован. Поэтому остается два варианта - либо перешивать контроллер, превратив его в Ардукоптер и потеряв все наработки от Walkera, либо пытаться что-то сделать с самим модулем GPS.
Немного гуглинга - находится последняя прошивка модуля в бинарнике. Быстрый просмотр - и НИЧЕГО. Во всей прошивке нет ничего похожего на таблицу строк GPS-сообщений... Значит они формируются как-то иначе ![]()
От безысходности отправляю сообщение с проблемой продавцу на Али, без особых надежд - товар уже подтвержден и оплачен, наши бы в такой ситуации просто бы послали. Однако к своему огромному удивлению меня на следующий день ждал ответ, в котором подробно расспросили о пожеланиях. Я подробно расписал ситуацию и отправил.
Но во время ожидания ответа под руку попались бинарник Валкеровской прошивки и программа для его заливки. А что если - их поковырять малость? Где-то еще валяется мой любимый "ковырикл" - IDA Pro... А чтобы было на что ориентироваться, скачиваю и конвертирую в бинарник еще и сам Ардупилот версии 3.1 - предположительно прошивка потырена именно с него.
В результате за день работы прошивка Валкеры была полностью расшифрована! Теперь можно с ней делать все что угодно - в том числе и заменить злосчастную букву в командах GPS. Меняю HEX-редактором, шифрую и прошиваю. Легкий мандраж "заведется-не заведется", и коптер как ни в чем ни бывало замигал левым зеленым глазом ![]() Ура, наши победили
Ура, наши победили ![]() "Если вас не устраивают существующие два выхода - то надо прогрызть третий!" (с) чужие
"Если вас не устраивают существующие два выхода - то надо прогрызть третий!" (с) чужие ![]()
Все правильно сделал
Теперь можно и собирать. Новый модуль заметно меньше, поэтому его можно подать малость вперед и этим освободить место под крышкой. Делаю плату вместо карбонового кругляка, на двухсторонний скотч наклеиваю модуль, соединяю землю - можно пробовать!



Результат был просто фантастическим - новый модуль легко поймал 7 спутников и 3D фикс с HDOP=1.6, находясь даже не на балконе а в комнате у окна! Позиция конечно немного гуляла, но оставалась в радиусе метра. Забегая чуть вперед - под открытым небом этот модуль ловит 16 спутников с HDOP=0.3!
Родной модуль был освобожден от держащего его целым двухстороннего скотча, подключен к компу и на пробу укомплектован хорошей керамической антенной, оставшейся от старого автонавигатора. С этой антенной его поведение заметно улучшилось - он таки смог определить координаты и относительно неплохо, но при этом сам не поверил своему счастью и сообщал что фикса на самом деле нет. Ну и ладно, может пригодится когда...
"Пригодился" он намного раньше чем предполагалось и совсем не так ![]() Началось все неожиданно: лежит модуль спокойно на подоконнике, показывает текущее место , я сижу паяю у компа, и вдруг краем глаза вижу что точка текущих координат на экране бодро так поехала на юго-запад. Причем это не было похоже на обычный шум, когда положение "скачет" вокруг правильного места, нет - оно явно показывало равномерное и прямолинейное движение! Не знай я что приемник лежит на подоконнике, я бы точно подумал что мой коптер куда-то улетает, и сделал бы все чтобы это предотвратить!
Началось все неожиданно: лежит модуль спокойно на подоконнике, показывает текущее место , я сижу паяю у компа, и вдруг краем глаза вижу что точка текущих координат на экране бодро так поехала на юго-запад. Причем это не было похоже на обычный шум, когда положение "скачет" вокруг правильного места, нет - оно явно показывало равномерное и прямолинейное движение! Не знай я что приемник лежит на подоконнике, я бы точно подумал что мой коптер куда-то улетает, и сделал бы все чтобы это предотвратить!
И именно так поступает полетный контроллер, когда такой глюк случается в воздухе! Он включает полный газ и старается двигаться в противоположном направлении, стремясь оказаться на том месте где был. Но только вот показания GPS уже не имеют ничего общего с реальными координатами, и коптер просто улетает вдаль, на сколько хватит батареи!
В моем же случае такое бешенство GPS модуля окончилось на южном полюсе, куда он в конце концов "добрался". После выключения и последующего включения он, как ни в чем не бывало, снова поймал координаты - но доверия к нему уже не было.
По некому размышлению представляется такая картина: как известно, модули BeStar являются поделкой на базе чипсета Ublox, а те выдают не честные координаты, вычисленные по спутникам, а пытаются еще их сгладить, для чего отслеживают текущую скорость, вычисляют новое положение при ее сохранении, и рассчитанные координаты усредняют с полученными со спутников. Это дает заметно бОльшую стабильность при висении (за что они и любимы для автопилотов), и очень характерные загибы треков в случае резких поворотов. Однако что случится, если процесс приема данных со спутников неожиданно остановится? Причем так, что сам приемник про то не узнает - например упадет поток обработки этих данных в его внутреннем процессоре? Датчиков ускорения на борту нет, так что скорость, запомненная по последнему изменению координат, будет сохраняться бесконечно! И получится именно такой улет... Так что модули МТК, которые в случае похожих проблем просто перестанут отдавать координаты, представляются мне гораздо более правильными. И наверное то, что родной GPS сразу потребовал замены - это сильно к лучшему ![]()
После победы над модулем GPS можно продолжать сборку, тем более что от получения квадрокоптера до начала сборки прошло чуть более двух месяцев, и наконец-то приехало все необходимое.
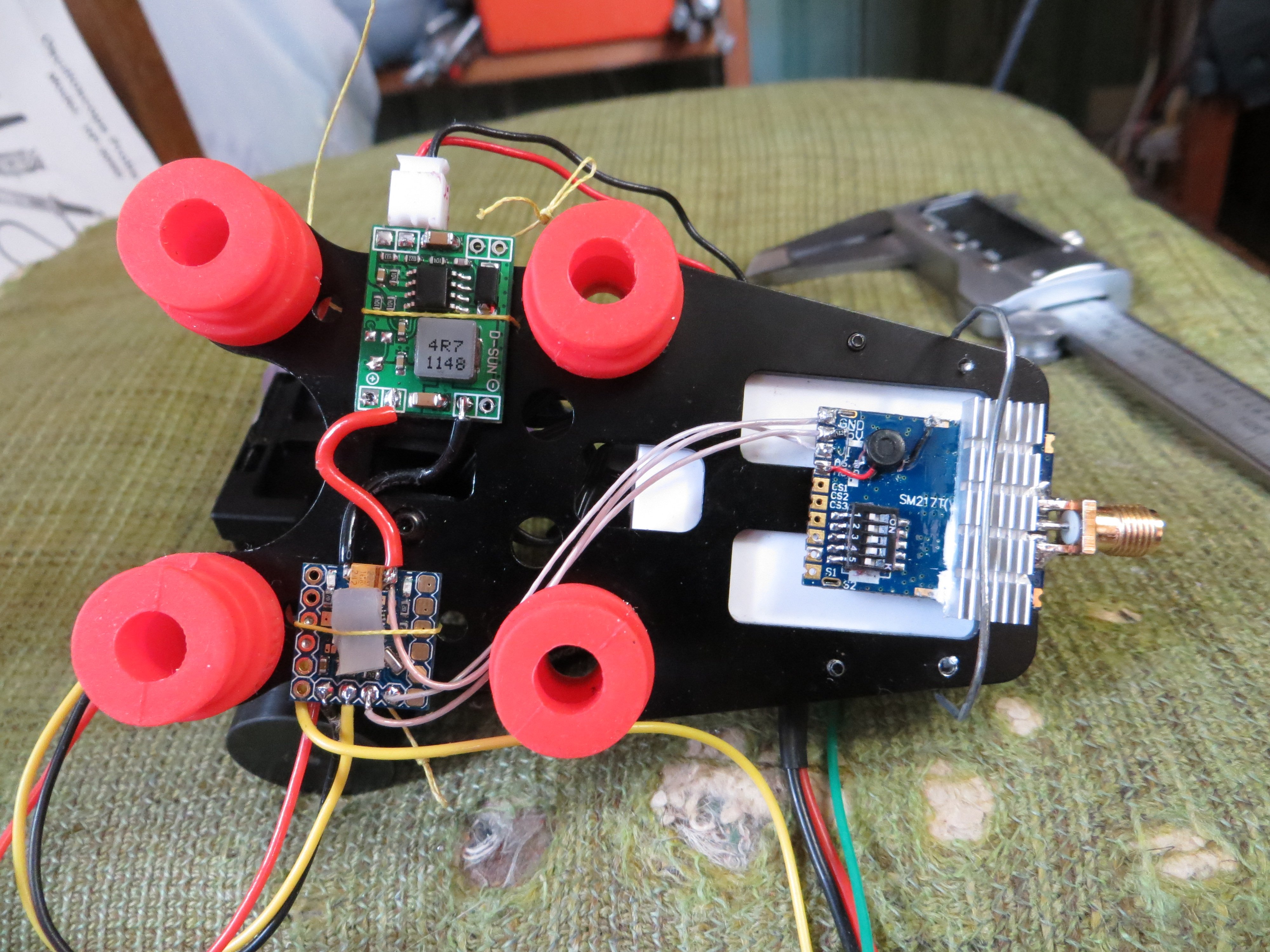
Модуль телеметрии, передающий ее на землю на частоте 433МГц, приобрел экран из тонкого стеклотекстолита, и разместился на кусочке двухстороннего скотча. Антенный разъем был отпаян для экономии веса, а антенна заменена на полноразмерный диполь из куска коаксиального кабеля. Красиво разместить такую антенну не удалось и она просто свисает вниз ниже ног, зато эффективность такой антенны оказалась намного выше штатного "поросячьего хвостика".
Уродское металлическое крепление подвеса, для монтажа которого приходится корячиться с пинцетом и отверткой, заменено на легкосъемное пластиковое. В качестве бонуса - пластиковое еще на пару грамм легче ![]() А так как подвес теперь легкосъемный, то все подключение подвеса выведено на один разъем - питание, управление наклоном, TX с контроллера. Канал для управления OSD отдельно выводить не требуется - OSD получает его при разборе данных телеметрии.
А так как подвес теперь легкосъемный, то все подключение подвеса выведено на один разъем - питание, управление наклоном, TX с контроллера. Канал для управления OSD отдельно выводить не требуется - OSD получает его при разборе данных телеметрии.


Родные резиновые тяжелые "копыта" заменены на кусочки пенполиэтиленовой трубы, соединяющей ногу и луч. Аэродинамическое сопротивление конечно возрасло, зато нагрузка на ногу при посадке стала передаваться еще и на луч - теперь грубая посадка не приведет к облому ног.

Приехала защита винтов от Валкеры, по сравнению с защитой от Фантома в три раза толще и в 5 раз дороже. Не пушинка однако... зато как оказалось очень прочная, еще и транспондер можно подвесить ![]()


После изучения вопроса в интернете в роли видеоприемника был заказан старый добрый Boscam-RC305, а видеопередатчик было решено брать DAL-TX600. Вроде бы куча плюсов - маленький и легкий, отдает честную мощность, не падающую в разЫ при смене диапазона, работает во всех возможных частотных сетках и перекрывает весь доступный диапазон. Казалось бы, ставить да радоваться, вот только состоит он из двух плат - собственно СВЧ модуля и 5в стабилизатора питания, закатанных в общую термоусадку. Передатчик и сам греется как печка, а тут мало того что его в "шубу" завернули, так еще и грелку подложили... шикаарное техническое решение придумали китайцы, ничего не скажешь. Естественно, проживет он от постоянного перегрева недолго, что вскоре и нашло подтверждение на форумах.

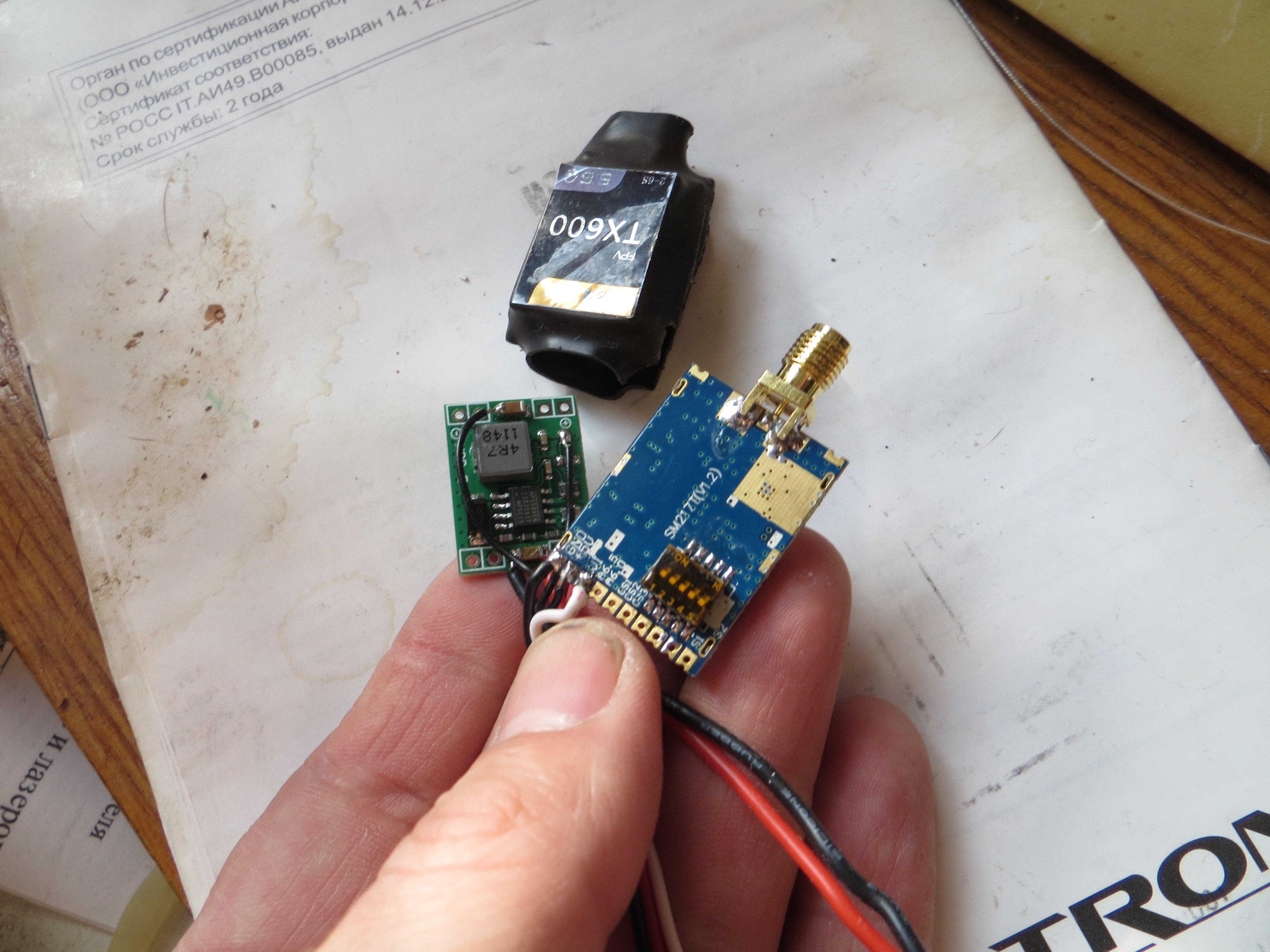

Вскрываю термоусадку - и обе платы на ладони. Вместе с китайской пайкой... ну нет, все провода нафиг и паять по новому, но уже не пяткой а руками. Но сначала нужно прикинуть расположение этого железа на подвесе - ибо нет смысла затаскивать видео внутрь корпуса и потом вытаскивать обратно, а значит модуль OSD должен тоже располагаться снаружи. Для этого лучше всего подошел бы такой модуль OSD, но то ли санкции, то ли еще какая неведомая фигня, но нам его отказываются слать - при заказе постоянно вываливалась ошибка про метод доставки, так что приходится мучаться с простым и незатейливым китайским MinimOSD.
...который доставил немало проблем, отказавшись прошивать шрифты напрочь. Программа управления делает вид что все ОК, а включаешь - те же заводские шрифты, совершенно не подходящие к нужной прошивке. Потому что прошита ArduCam, а уже 2 года как есть MinimOSD-Extra, которая позволяет организовать два независимых экрана, имеет большее количество параметров, и самое главное - почти графический плавный горизонт! То есть такие плюсы, отказываться от которых совсем не хочется - так что плата ОСД снова и снова переключается между программатором и стендом. И вот в процессе этих перетыканий я промахиваюсь и надеваю разъем со смещением...
Есть такая шутка: вся электроника работает на зеленом вонючем дыме, поэтому если он выходит то она больше не работает. И именно этот дым из микросхемы контроллера дал понять что что-то пошло не так...
После того как дым рассеялся а плата остыла, настало время оценить потери и обдумать планы на будущее. Снимаю сдохшую микросхему, подключаю - так, питание есть, другие детали не греются, так что есть надежда что после "пересадки мозга" жить будет. Платы с такими контроллерами уже едут из Китая (там готовые платы в 4 раза дешевле чем голый чип в местном магазине, странно однако!), приедут продолжим. А пока - а что там сообщество обсуждает про этот OSD? То есть - снова этот форумный бред просеивать в поисках зерен здравого смысла...
Контроллеры ехали долго, так что времени хватило чтобы полностью отрефакторить код MinimOSD-Extra, значительно сократить расход памяти (было 190 байт свободно стало 721) , переделать логику управления и добавить кучу новых возможностей. Подробности - в комментариях к коду на Гитхабе.
Процесс отладки OSD - в Виртуалбоксе стоит Вин7, в него проброшена USB-плата видеозахвата (линуксовый драйвер оказался кривым до невозможности), в результате такие вот скриншоты ![]()

После приезда контроллеров один был использован в роли донора "мозга", 15 минут с паяльной станцией - и вот OSD готов для проверки. Подключаю к программатору, заливаю прошивку - работает! Настройки, шрифты... подключаю видео - фигвам, те же старые шрифты... ну что ему не хватает? Стоп! Может ему что-то не хватает, например питания? Меряю напряжение, и точно - с программатора идет всего 4.3 вольта вместо положенных 5! А при чтении форумов где-то попадалось, что использованная микросхема знакогенератора очень чувствительна к питанию. Достаю с полки старый ненужный USB хаб, запитываю от блока питания с напряжением 5.2 вольта, в хаб программатор, к нему OSD - понеслись шрифты! Что там у нас на видео? Ура, заработало! (С)
Только какое-то все некрасивое, особенно звездочку покривило... и горизонт какой-то куцый.. Таак, где там у нас редактор шрифтов? Вот так мне больше нравится ![]()

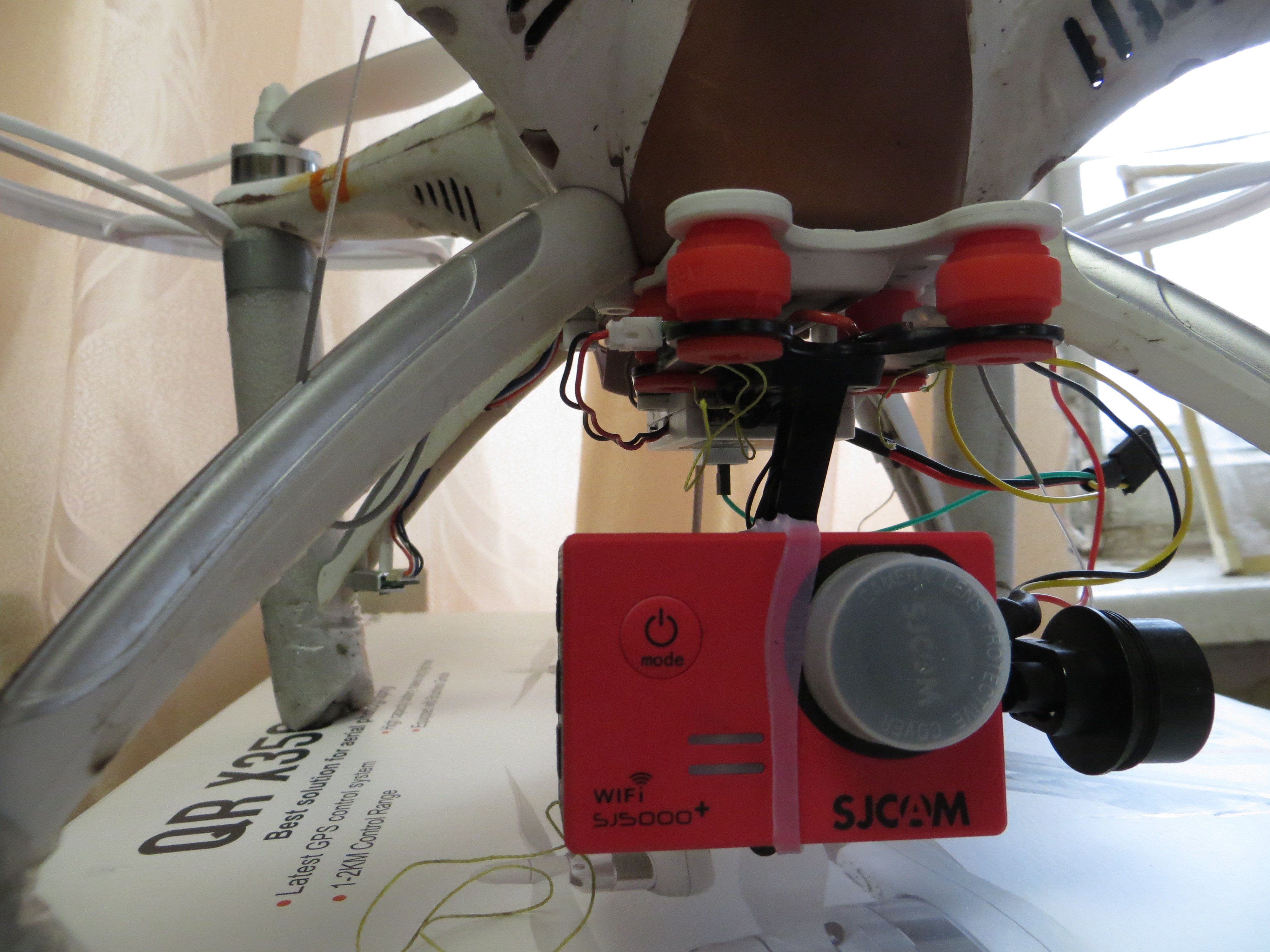
Приехала заказанная камера - SJ5000+. Если ее предшественница была подделкой под GoPro, то эта - двоюродный брат-близнец ![]() Ибо сделана на том же чипсете, объективе и сенсоре, что и GoPro 3BE. Соответственно и снимает она весьма прилично, а цветопередача понравилась мне даже больше чем у GoPro. Вот только разъем у нее не MiniUSB как у оригинала, а MicroUSB, так что штатный шнурок естественно остался не у дел. Но самой большой проблемой оказался размер - почему-то она на миллиметр больше по ширине и высоте чем GoPro, соответственно в посадочное место на подвесе она не влезает
Ибо сделана на том же чипсете, объективе и сенсоре, что и GoPro 3BE. Соответственно и снимает она весьма прилично, а цветопередача понравилась мне даже больше чем у GoPro. Вот только разъем у нее не MiniUSB как у оригинала, а MicroUSB, так что штатный шнурок естественно остался не у дел. Но самой большой проблемой оказался размер - почему-то она на миллиметр больше по ширине и высоте чем GoPro, соответственно в посадочное место на подвесе она не влезает ![]() Так что приходится обратиться к варварским методам и решить вопрос кардинально - срезать часть бортика у подвеса. После этого камера разместилась в нем как будто родная, даже центр тяжести почти попал в нужное место и подвес сохраняет положение камеры даже в выключенном виде.
Так что приходится обратиться к варварским методам и решить вопрос кардинально - срезать часть бортика у подвеса. После этого камера разместилась в нем как будто родная, даже центр тяжести почти попал в нужное место и подвес сохраняет положение камеры даже в выключенном виде.

детективная история про камеры
В процессе рассматривания валяющихся винтов внезапно выкристаллизовалась мысль, сидевшая где-то внутри и не дававшая покоя с первого взгляда на коптер - а винты-то самолетные! То есть имеющие крутку лопасти по диаметру, предназначенную для работы винта в скоростном потоке: линейная скорость точки вблизи ступицы винта меньше чем точки на конце лопасти, а значит поток они проходят с разными углами. В вертолетных же винтах лопасть без крутки, ибо работает в практически неподвижном воздухе, и угол атаки постоянен. И в общем-то достаточно посмотреть на настоящие вертолеты с их плоскими лопастями, чтоб в этом убедиться.
Так что снова длительный поиск и заказ альтернативного комплекта винтов "на попроб", похожих на винты от "Фантома" (и по логике имеющих правильную вертолетную форму). На форумах их ругают дескать устойчивость с ними хуже - но устойчивость есть вопрос регулировки, так что хочется самому проверить.
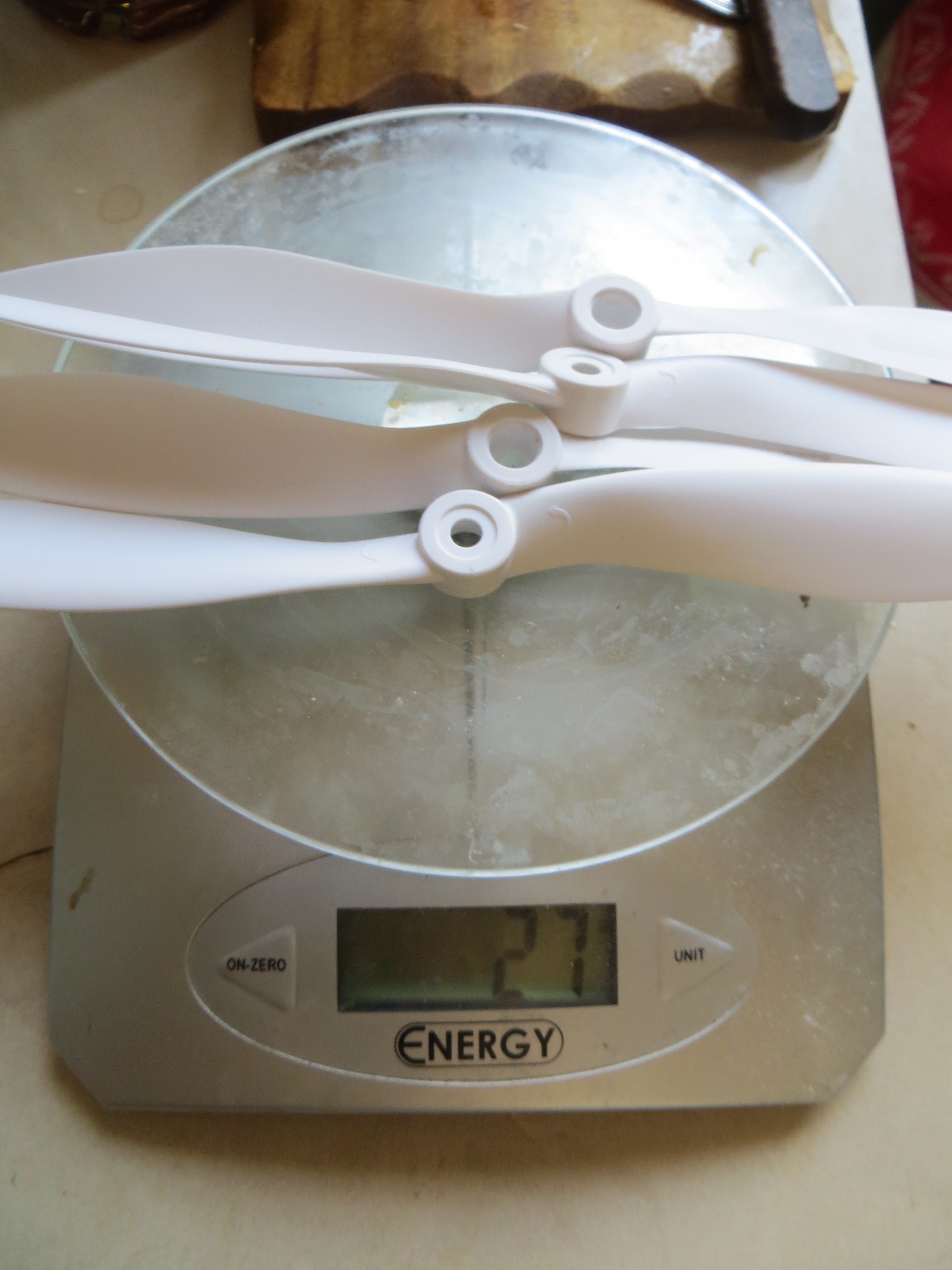


Сразу по получению винтов была измерена тяга на половине газа и на полном газу, для чего к коптеру была скотчем примотана наковальня весом 3кг - чтоб не улетел, и вся конструкция была водружена на весы. Результат получился не особо понятным - на пол-газа новые винты вроде как дали результат чуть похуже, а на полном газу - чуть получше, но ток при этом не мониторился, а значит нужно будет повторить когда приедет датчик тока. Ну и винты меньшего шага заказал - 3. 8 вместо 4.7 у всех вышеупомянутых.
Если же отвлечься от винтов то результаты такие - коптер уже настроен для взлета на пол-газа, при этом фактический газ составляет 60%, а значит есть небольшой запас по нагрузке! 70% от полной тяги это 1540 грамм, а это означает что можно добавить еще батарей - в теории максимальное время полета коптера получается в случае, когда масса батареи вдвое превышает массу остального железа(!!!). Однако начиная с точки 0.8 массы график крайне пологий, и разница между 0.8М и 2М - около 10%, поэтому в качестве рабочей массы батареи можно принять 0.7 массы пустого коптера. В нашем случае это составит 650 грамм - 4 зиппи компакта или две родные батареи, и это с натяжкой но укладывается в максимальный вес!
...но разве можно иметь коптер три месяца - и так и не полетать?! Вот мы и решили в выходные выехать куда-нибудь за город и малость полетать в поле, пока еще снег и не так больно падать. Монитор для видео с камеры пока еще не приехал, так что видеопередатчик и OSD пока остаются дома, а мы с кучей остального железа грузимся в машину. Ох, неудобно-то как! Коптер в пакет не лезет - за все цепляется, приходится нести отдельно, плюс две сумки... Записываем - нужен специализированный чемодан под коптер и наземное оборудование.
Приехали - а в поле-то оказывается ветер! Да еще и порывистый - явно нелетная погода. Но нам же хочется! Вытаскиваем, подготавливаем, включаем - поехали! Первый полет - на видео. Хотя на борт ставилась камера, но оказалось что в режиме видеорегистратора она не управляется с кнопки, а пишет только если подано внешнее питание - так что видео с борта на этот раз не получилось. Несмотря на увеличившуюся парусность, коптер показал себя молодцом - держался в точке, летал против ветра и даже рулился моими кривыми руками ![]()
Приехал правильный модуль OSD (заказанный для меня одним европейским знакомым), был тут же прошит новой прошивкой со шрифтами, и был размещен прямо на подвесе вместе со с преобразователем питания от видеопередатчика. Коий тоже разместился на подвесе. Получилось очень удобно - компактно и быстросъемно.
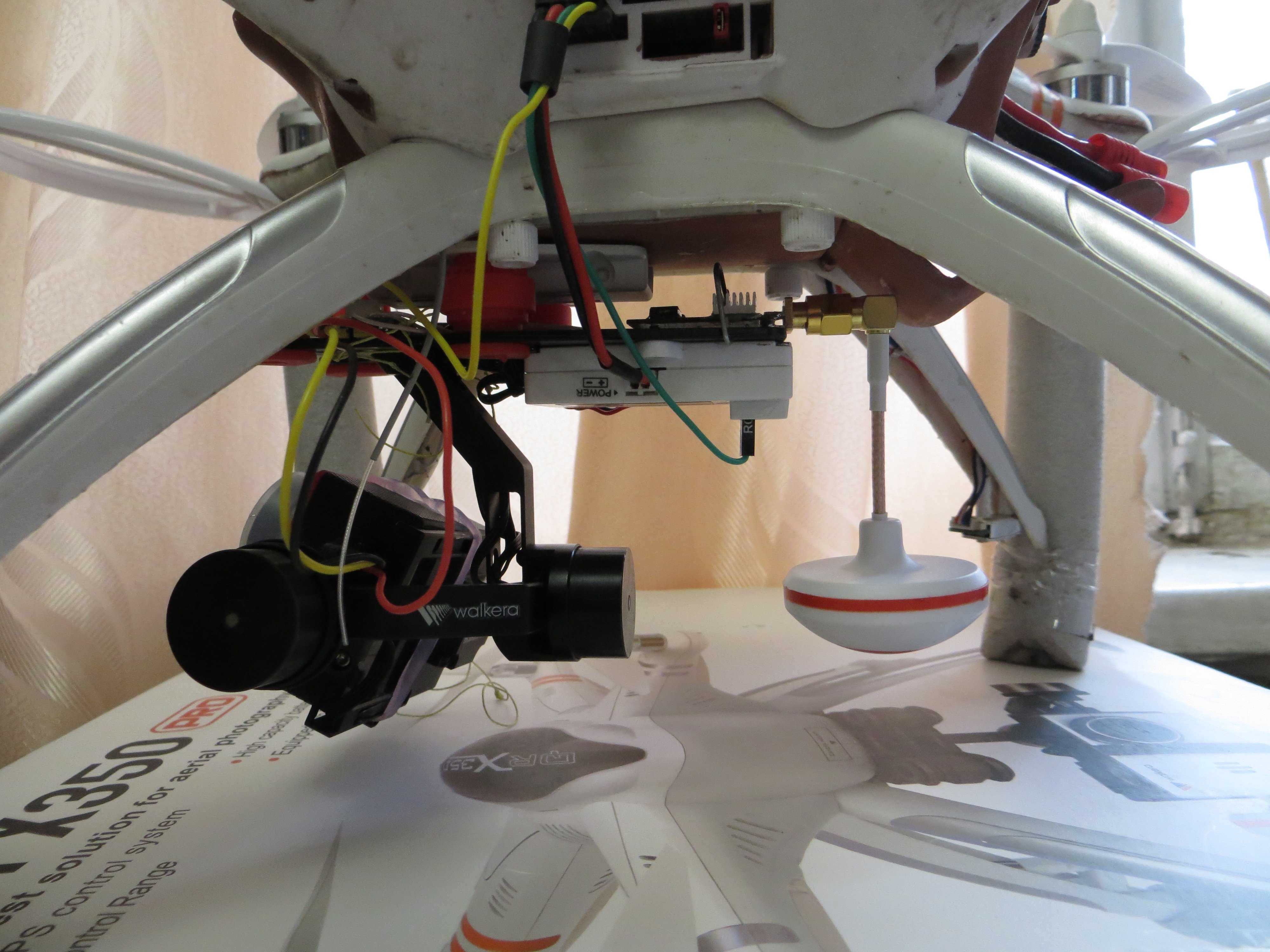
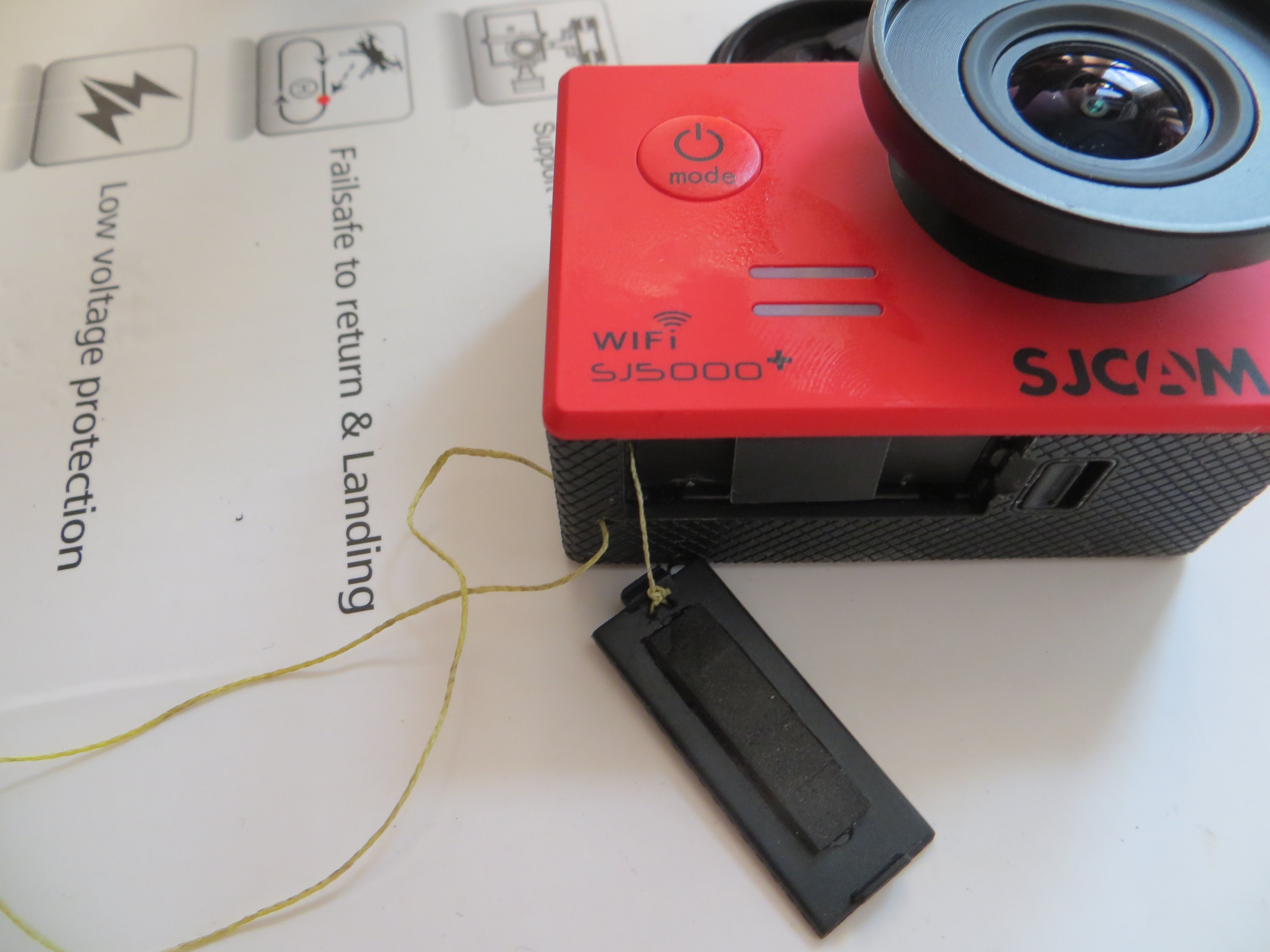
К камере была куплена дополнительная защита объектива - теперь камера лежит на плоской поверхности, не касаясь ее объективом. И сама камера была чуть доработана - крышка батарейного отсека закреплена к камере кевларовой нитью, дабы не искать ее потом в траве, также сделано страховочное кольцо из той же кевларовой нити. Ох как нам это вскорости пригодилось...

И вот наконец-то теплая погода! Выезжаем полетать на ближайшее к городу поле. Ключ на старт... а что это с левым передним мотором? Не хочет он похоже работать -дерганина одна... Ну да ладно, после некоторого шевеления рукояток моторы вроде начали бойко крутиться - взлет!
...ну ведь говорила же мне бабушка - если что СРАЗУ пошло не так то надо разворачивать домой! Полет продолжался меньше минуты - вскоре после взлета начал сбоить контроллер того же самого мотора, и коптер, потеряв один мотор, рухнул с высоты около 15 метров...
Ооо как здорово что мы купили и поставили защиту винтов! Она спокойно приняла на себя удар падения, и повреждений не было вообще. От слова совсем. Ну камеру с резинок сорвало - поправимо! И как же хорошо что все детали соединены кевларовой нитью - никаких поисков в траве, просто поднимаешь "ожерелье" из коптера, подвеса, камеры, демпферов, етц...
Быстро устранив последствия авиакатастрофы, внимательно смотрим - какой именно из моторов хулиганит?
Левый передний, да чтоб его... вопрос "кто виноват" - двигатель или регулятор - как будто бы решился сам собой, ибо не может самопроизвольно дергаться выключенный мотор!
После этой авиакатастрофы стала вроде понятна еще одна причина регулярных падений этой модели коптера - хреновые регуляторы. Ибо так глючить после пары минут полной тяги нормальный регулятор вроде как не должен, а других причин проглючить вроде как не было.
Ожидание нового регулятора отложило полеты еще на месяц. Но кроме родного Валкеровского регулятора были заказаны также и альтернативные регуляторы для фантома, по слухам подходящие и сюда. Три недели, и приехавший первым родной валкеровский регулятор занимает свое родное место. Первое включение - ЧТОЗА??? Мотор хоть и не включается самопроизвольно, но нормально не работает, дергаясь на старте. А раз замена регулятора не помогла - значит мотор?!
Снова разбираю коптер (17 винтов!) и снимаю мотор. Так и есть - на обмотке под одним из отверстий видно отпечаток болта. Но я не путал болты - неужто китайцы при сборке? Еще одна причина загадочных падений раскрыта, а сейчас - тестер мне, тестер! Обмотки мотора соединены по схеме "треугольник", и промерка сопротивлений показала обрыв: 0.4, 0.8, 0.4 ома соответственно... В ретроспективе становится понятно все произошедшее - на малой нагрузке поврежденная обмотка еще работала, а вот тест полного газа, при котором ток мотора достигает 12 ампер, ее добил - а в полете порванная обмотка убила регулятор, который героически пытался крутить поврежденный мотор...
Делать нечего - приходится заказать еще и мотор. А до кучи - еще и набор альтернативных моторов от GARTT, которые по отзывам намного лучше и мощнее родных.
Продолжение следует. Надеюсь...



Свежие комментарии
Очень красиво!
Много подобных фонарей, видел в китайском магазине Алиэкспресс. Я там часто покупаю… »
Это бесполезно :( Если мне доводится проезжать мимо, то набираю по 6-10 картофельных мешков… »
clopman16:
Да, я понимаю. Они и тушенку выбрасывают, не открыв даже.. и газовые баллоны почти полные.… »
clopman16:К слову говоря -в одиночку спускаться через эту расщелину с лодкой и тактическим рюкзачком… »
Night_Ghost:
про расщелину ту я высказался еще тогда когда мы вместе в ту сторону шли. В дождь с грузом… »
clopman16:
кстати от блюдца влево на сумган (теперь правда не блюдца а куска профнастила) - дорога… »
Night_Ghost:
В начале прошлого года еще читалась, хотя и плохо, но идти по ней проблем не было. Похоже… »
clopman16:
над каким бревном?
Night_Ghost:
над одним из бревен через Атышку мы протянули канат для удобства перехода. Но судя по… »
clopman16:
веревок точно не видел, мест для пересечения Атышки было три. Сразу после спуска - лежало… »
Night_Ghost:
мы шли с другой стороны - от Атыша, веревку вешали на втором дереве, ну да, где-то 20см… »
Прям-таки "свидетельства выживших", блин. О том как в +10 и дождь от переохлаждения погибла… »
clopman16:
Не слышал. Можно подробнее? Разумеется после такой вылазки были внесены изменения в… »
Night_Ghost:
Когда писАл графоманию про Перевал Дятлова, перерыл пол-интернета на тему ЧП в походах, и… »
clopman16:
я чтото помню лет 5-7 назад группа школьников при переходе на Атыш от 71км, вляпалась в… »
Night_Ghost:
Любой выход из города с легкостью превращается в треш и кошмар, стОит чему-то пойти не так.… »
clopman16:
Классен Вадим.
на Зубчатках..
Night_Ghost:
Земля пухом...
Но я не о персоналиях, а о том что в противостоянии "один человек против… »
Как непосредственный участник вышеописанных безобразий, внесу свои 5 копеек.
1. Фонарь был… »
clopman16:
Хм, а у меня четко отложились воспоминания -что дорогу приходилось "запоминать". Наверное… »
clopman16:Мне в прошлом году пришлось двигаться по Лемезе (подходили к Атышу) тоже в около-ночное… »
Night_Ghost:
Тут от тумана зависит. Если можно поднять фонарь так чтобы он вышел из дымки, либо опустить… »
clopman16:
смотрю что китайские монокли, ночного видения неприлично дешевы, интересно как они в таких… »
Night_Ghost:
Тут только пробовать. Разница температуры воды и воздуха может дать засветку.
Я кажется… »
clopman16:
В 2015 у меня был момент когда с наступлением темноты, последние 5 км навигации по Большому… »
Night_Ghost:
Это очень рисковано. Река живет своей жизнью, немного меняя русло каждый год во время… »
clopman16:
кстати а что тогда все таки утонуло?)
Night_Ghost:
Не понял вопроса. Мой навигатор, например, ну и я по плечи почти при причаливании. Что… »