

 475
475Про отклонения
27 декабря 2016, 03:07 | С высоты Автор: Night_Ghost
Наконец-то приехал из Поднебесной долгожданный модуль 4-в-1, позволяющий получить из пульта Дево-10
совершенно универсальный пульт, способный управлять практически всеми современными радиоуправляемыми изделиями.

Вот только одно маленькое "но" - для этого родную прошивку пульта нужно заменить на альтернативную, разрабатываемую сообществом открытую прошивку с оригинальным названием Deviation - что переводится как "отклонение", а в медицинской среде вообще как "извращение".

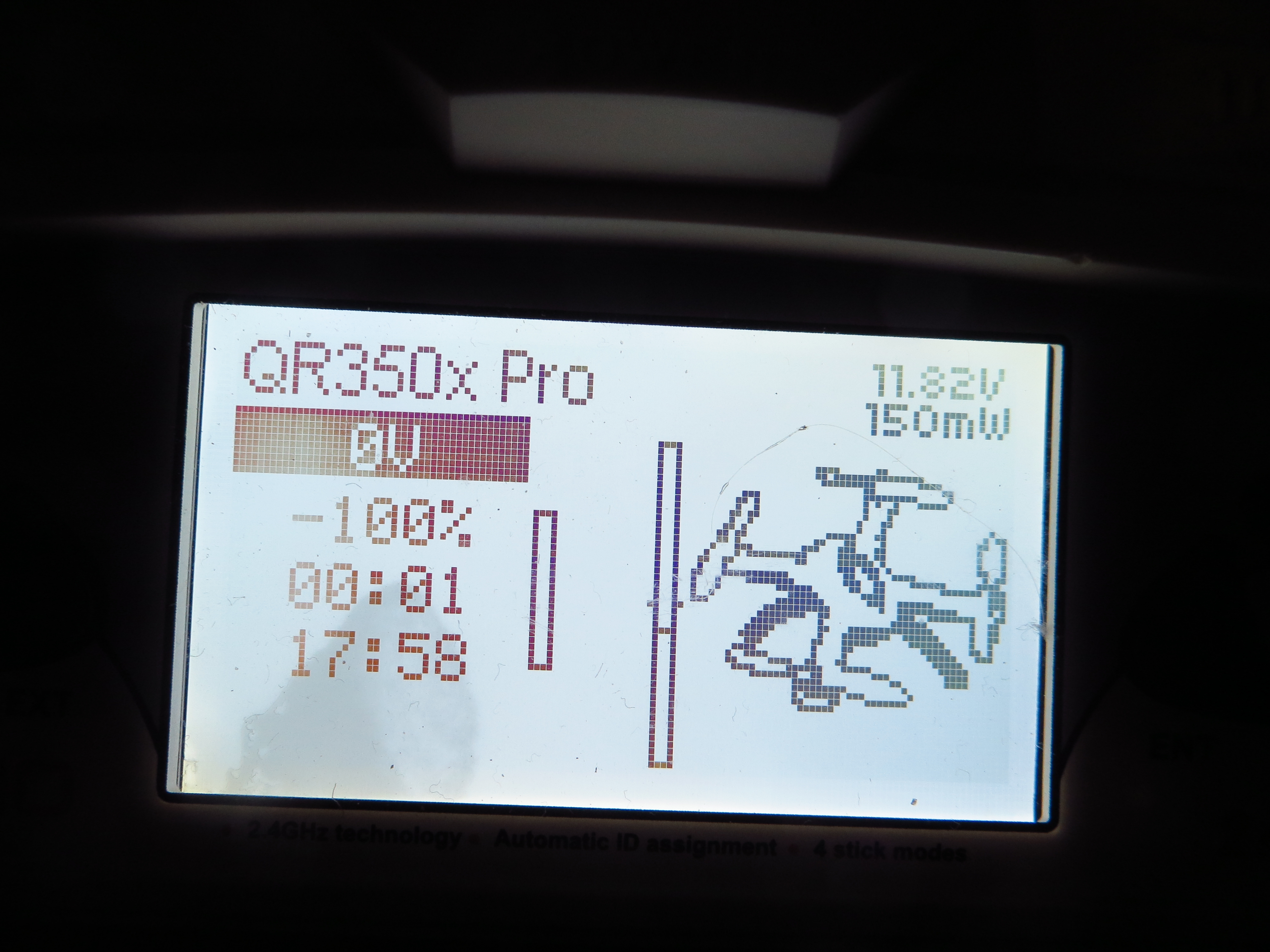
И, по первому впечатлению, называется она так совсем неспроста. Если для настройки пульта с родной прошивкой "из коробки" потребовалось около часа, чтобы разобраться как там все работает, то это "отклонение" потребовало полтора дня гуглинга и вдумчивого чтения мануалов (причем мануал есть только от позапрошлой версии!) - ни одна найденная готовая модель так и не заработала. Но таки удалось самому настроить главную "хотелку" - 6 полетных режимов на тех же двух тумблерах, как это было и раньше. А также пересадить регулировку наклона камеры с "крутилки" на свободный правый триммер - тем самым избавившись от так надоевших случайных расположений камеры. На фото - основной экран с напряжением и положением камеры.
После преодоления порога вхождения возможности альтернативной прошивки просто поражают! Она умеет практически все что может понадобиться от пульта: менять раскладку экрана (независимо для каждой модели!), настраивать все что угодно как угодно, изображать дополнительные каналы из триммеров и даже кнопок меню, и в том числе сохранять любые данные телеметрии для последующего просмотра.
И конечно же самое главное ее свойство - поддержка 4-х радиомодулей и десятки различных протоколов разных летающих, ездящих и плавающих штуковин! Так что вся домашняя "эскадрилья" тут же была пересажена со своих игрушечных пультов на этот. И как оказалось - совершенно не зря! Особенно разница оказалась заметна в поведении "мелколета" JJRC-1000 - если с родным пультом его невозможно было держать в точке, ибо небольшого подруливания он не чувствовал, а чуть большее уже вызывало значительные сдвиги - вобщем, мотало его, как нечто в проруби... С нормальным же пультом он висит в точности так, как и ожидается, и спокойно удерживается в точке.

И в заключении бонус - файл модели с настройками под АдруКоптер, с поддержкой и записью телеметрии (только во время полета!), 6-ю режимами, напряжением коптера на главном экране и таймером по газу.
Свежие комментарии
Очень красиво!
Много подобных фонарей, видел в китайском магазине Алиэкспресс. Я там часто покупаю… »
Это бесполезно :( Если мне доводится проезжать мимо, то набираю по 6-10 картофельных мешков… »
clopman16:
Да, я понимаю. Они и тушенку выбрасывают, не открыв даже.. и газовые баллоны почти полные.… »
clopman16:К слову говоря -в одиночку спускаться через эту расщелину с лодкой и тактическим рюкзачком… »
Night_Ghost:
про расщелину ту я высказался еще тогда когда мы вместе в ту сторону шли. В дождь с грузом… »
clopman16:
кстати от блюдца влево на сумган (теперь правда не блюдца а куска профнастила) - дорога… »
Night_Ghost:
В начале прошлого года еще читалась, хотя и плохо, но идти по ней проблем не было. Похоже… »
clopman16:
над каким бревном?
Night_Ghost:
над одним из бревен через Атышку мы протянули канат для удобства перехода. Но судя по… »
clopman16:
веревок точно не видел, мест для пересечения Атышки было три. Сразу после спуска - лежало… »
Night_Ghost:
мы шли с другой стороны - от Атыша, веревку вешали на втором дереве, ну да, где-то 20см… »
Прям-таки "свидетельства выживших", блин. О том как в +10 и дождь от переохлаждения погибла… »
clopman16:
Не слышал. Можно подробнее? Разумеется после такой вылазки были внесены изменения в… »
Night_Ghost:
Когда писАл графоманию про Перевал Дятлова, перерыл пол-интернета на тему ЧП в походах, и… »
clopman16:
я чтото помню лет 5-7 назад группа школьников при переходе на Атыш от 71км, вляпалась в… »
Night_Ghost:
Любой выход из города с легкостью превращается в треш и кошмар, стОит чему-то пойти не так.… »
clopman16:
Классен Вадим.
на Зубчатках..
Night_Ghost:
Земля пухом...
Но я не о персоналиях, а о том что в противостоянии "один человек против… »
Как непосредственный участник вышеописанных безобразий, внесу свои 5 копеек.
1. Фонарь был… »
clopman16:
Хм, а у меня четко отложились воспоминания -что дорогу приходилось "запоминать". Наверное… »
clopman16:Мне в прошлом году пришлось двигаться по Лемезе (подходили к Атышу) тоже в около-ночное… »
Night_Ghost:
Тут от тумана зависит. Если можно поднять фонарь так чтобы он вышел из дымки, либо опустить… »
clopman16:
смотрю что китайские монокли, ночного видения неприлично дешевы, интересно как они в таких… »
Night_Ghost:
Тут только пробовать. Разница температуры воды и воздуха может дать засветку.
Я кажется… »
clopman16:
В 2015 у меня был момент когда с наступлением темноты, последние 5 км навигации по Большому… »
Night_Ghost:
Это очень рисковано. Река живет своей жизнью, немного меняя русло каждый год во время… »
clopman16:
кстати а что тогда все таки утонуло?)
Night_Ghost:
Не понял вопроса. Мой навигатор, например, ну и я по плечи почти при причаливании. Что… »